
一种基于光学跟踪的串并联骨盆骨折复位机器人系统
技术领域
本装置涉及一种适用于骨盆骨折复位手术的基于光学跟踪的手术机器人系统
专利对比
在该领域的骨盆骨折复位手术中已经存在多项类似的专利,比如专利号CN202110569923, CN202011212195和CN201510144378。
专利号CN202110569923——一种串并混联的骨盆骨折复位机器人采用直线模组和球面并联机构组合的形式,以达到骨针操纵所需的自由度以及刚度。然而在专利文档所述方案中,该系统无法与骨盆的医学影像相互配合,使机器人知晓骨盆的位置以获得位置反馈,即该系统在整个手术操作过程中均为开环操作。在完成复位操作之后无法自行根据复位后的医学影像中显示出来的误差进一步进行操作。另外,该设计中采用了三个直线模组来构成其串联部分,虽然使机器人具备了较大的工作空间和承载能力,但是在使用中难以保证其无菌性,因为该结构的运动特点使其难以作为一次性用品也难以用无菌薄膜将其覆盖,安全性上的考虑有所欠缺。
专利号CN202011212195——一种空间混联骨盆骨折复位机器人是一种可移动式的骨盆骨折复位机器人。其设计原理与上述专利类似,均为串并联混合设计的机器人结构。同样地,在专利文档中也未涉及医学影像与机器人坐标系之间的关系。问题与上述专利一样,控制是开环的,难以纠正复位误差和确保机器人实际的复位精度。
专利号CN201510144378——一种六自由度串并联骨盆骨折复位机器人描述了一种和CN202110569923类似的设计。该设计与后者不同可以使用无菌膜包裹来确保术中无菌性,以保证手术安全。同样地存在上述机器人中的精度反馈和医学影像的配合问题。
背景技术
随着社会上汽车保有量的增加,车祸事故发生的概率和因车祸受伤的人数也在逐年增加。骨盆骨折作为一种严重的创伤,常见于车祸、地震等会给人造成剧烈外部打击伤害的灾难中。传统的人工骨盆复位术中,一般在术前和术中的X光影像的参考下,术者使用骨针等工具来调整骨盆患处的位置并固定来复位。然而在实际应用中,复位状况通常需要拍摄多个X光影像来持续确认,另外影像与实际骨盆的位置之间的映射不够直观,需要医生通过经验来判断,因此间接延长了手术时间、不可避免地给医生和患者带来了较多的辐射量。
本文中所述机器人设计针对的步骤是植入骨针后调整患处并复位的过程。在完成骨针的植入后,机器人末端执行器操作骨针来完成骨盆患处的复位任务。前面所述的几个专利虽然都能完成这一任务,但是由于其方案未能表现出系统与医学影像之间的配准关系,因此难以保证机器人复位操作是否符合实际的骨折错位距离和复位后的精度。
方案内容
本方案针对现有技术存在的上述不足,在能够满足临床操作的基础上设计了一种面向骨盆骨折复位手术的串并联机器人系统。该系统将光学定位系统集成入该类机器人中,并描述了一种基于该系统、在医学影像配准下机器人辅助手术流程。在完成各坐标系配准后,机器人系统和术前、术中医学影像都被统一到光学定位坐标系下,从而使机器人能把握患侧骨盆的位置并精确复位。
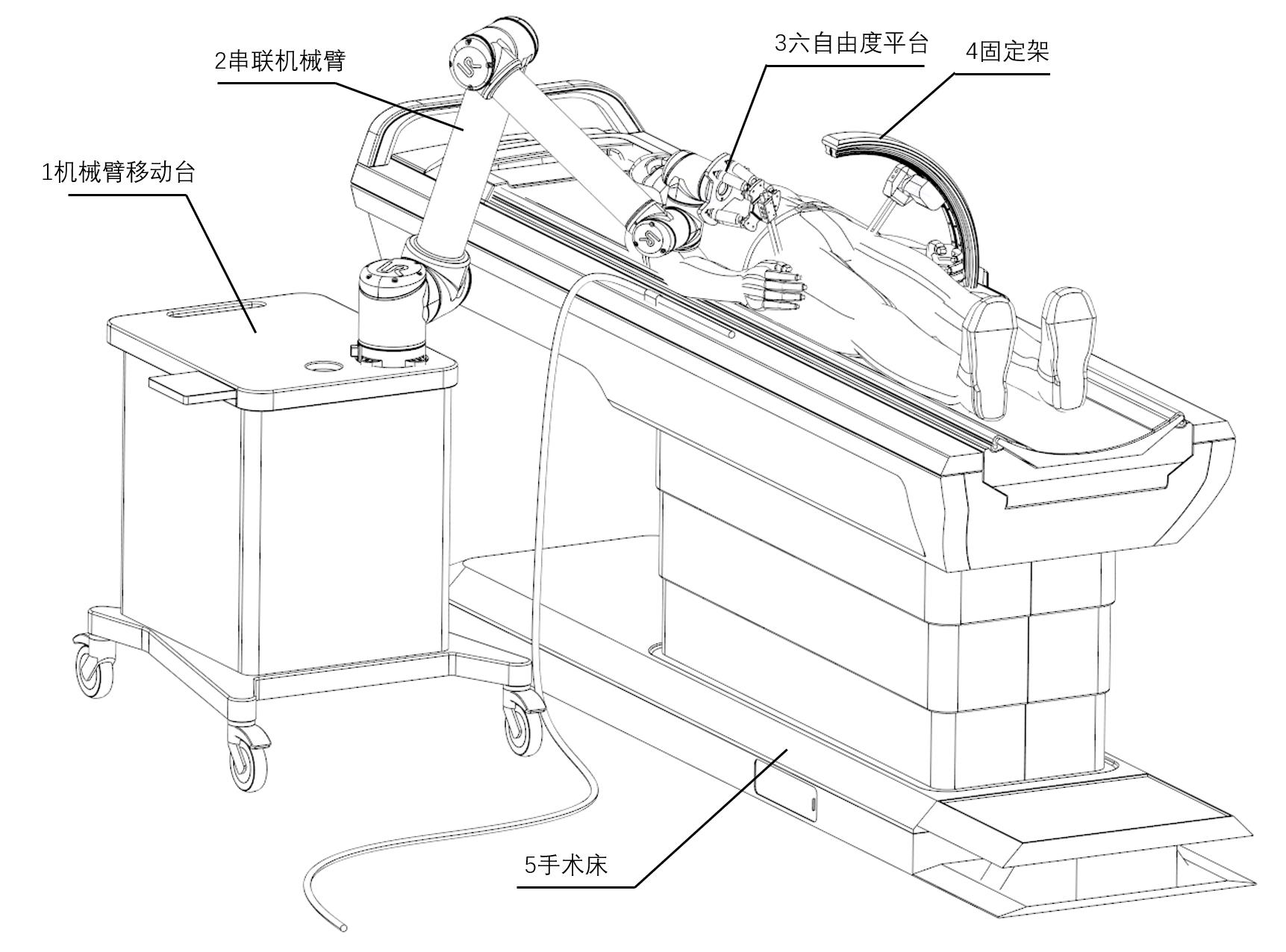
该手术机器人的设计包含手术床、机械臂移动台、串联机械臂、六自由度平台和固定架,其中串并联操作臂提供十二个自由度,满足复位操作的运动所需。该机械臂末端执行器部分为带有反光球标志物的骨针固定盒,可以被光学定位探头捕捉到并反馈该盒所在位置。固定架可以在手术床上滑动以固定非患侧的骨盆位置。
附图说明
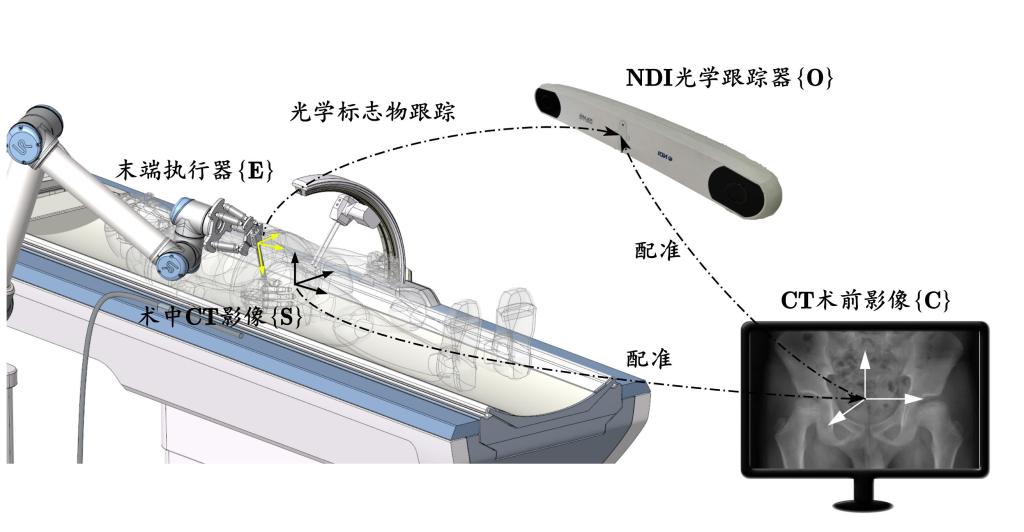
图1是该系统各设备的工作示意图;
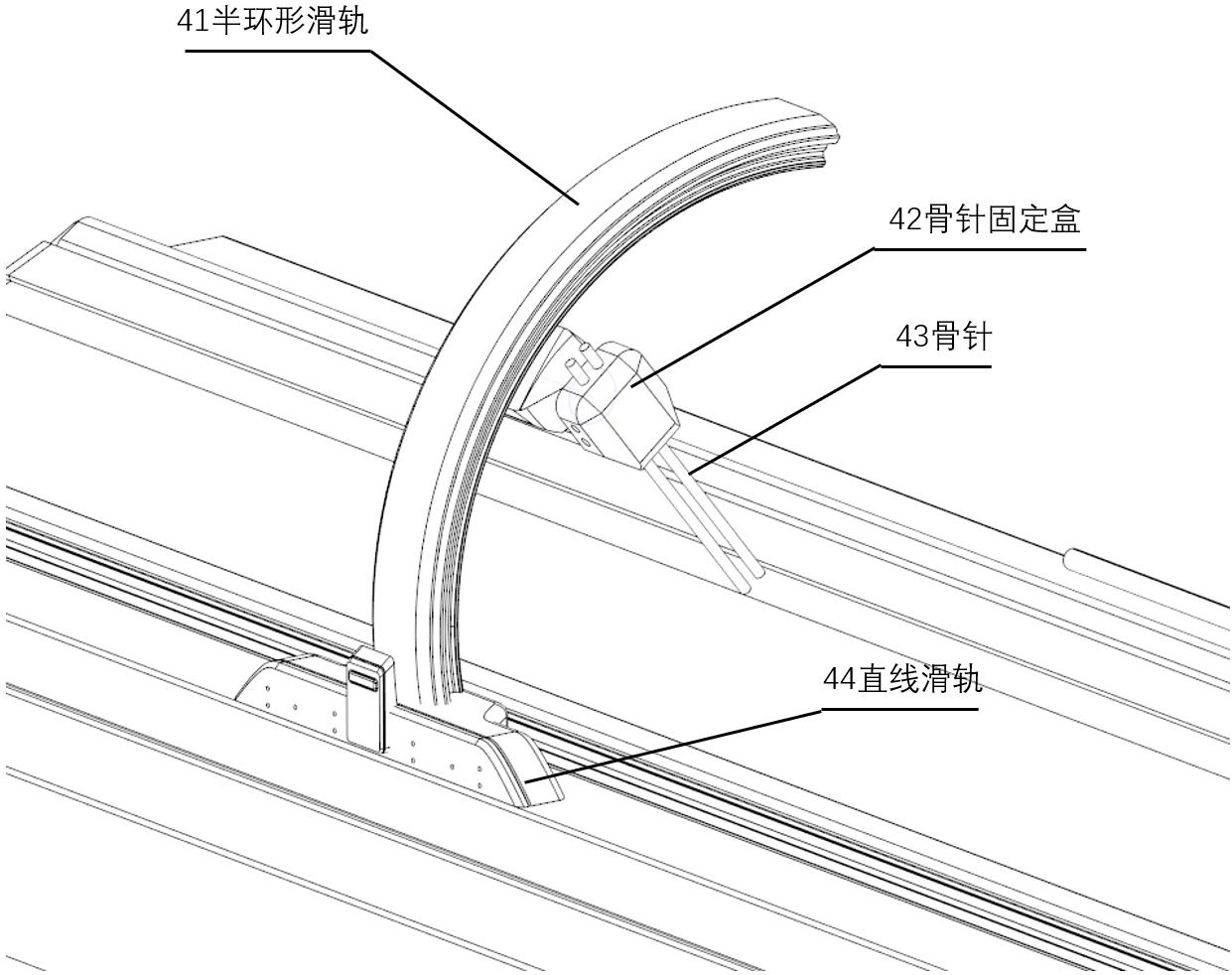
图2是固定架的组成示意图;
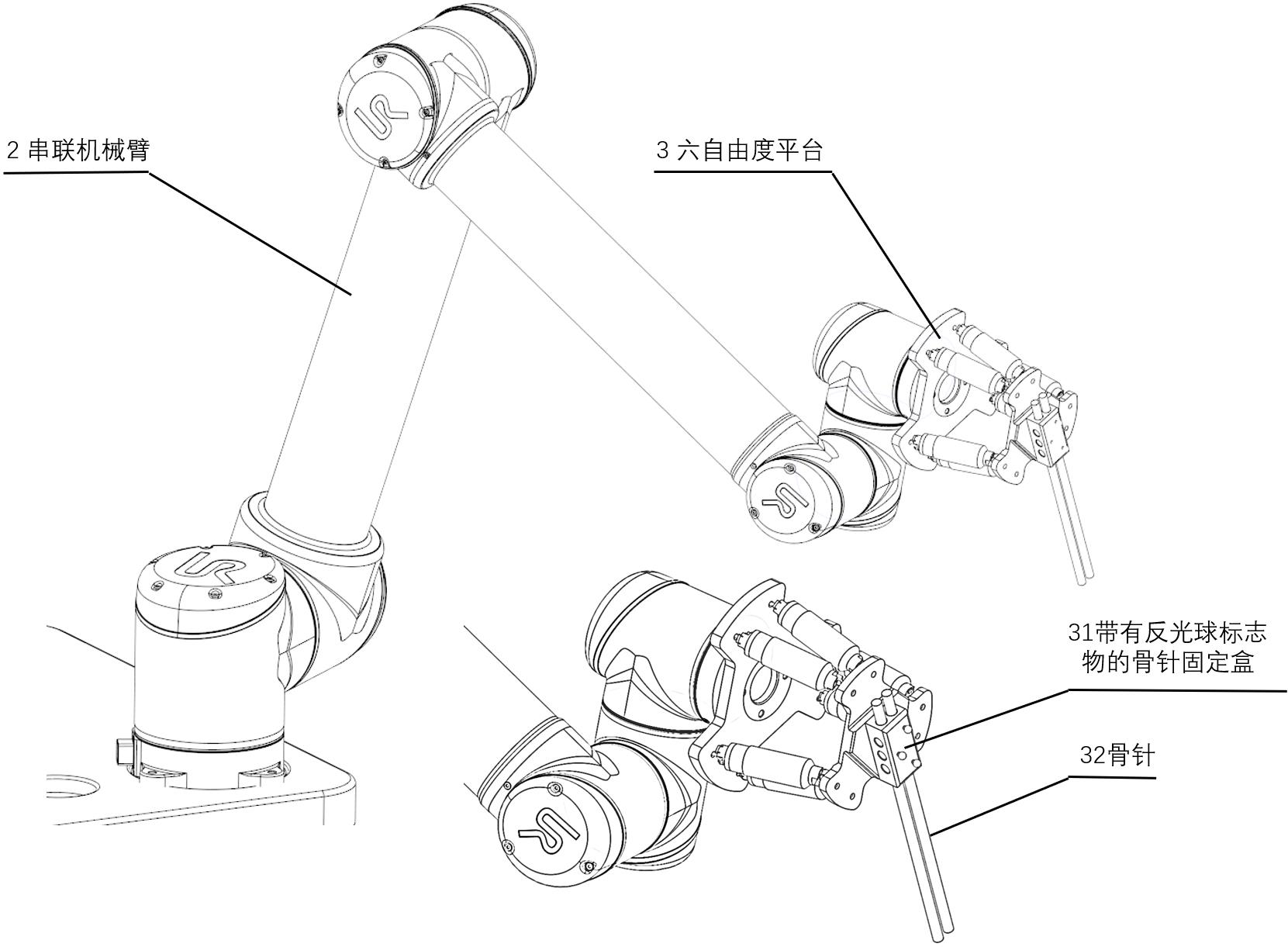
图3是串并联机械臂的结构示意图;
图4是系统的各坐标系之间关系示意图;
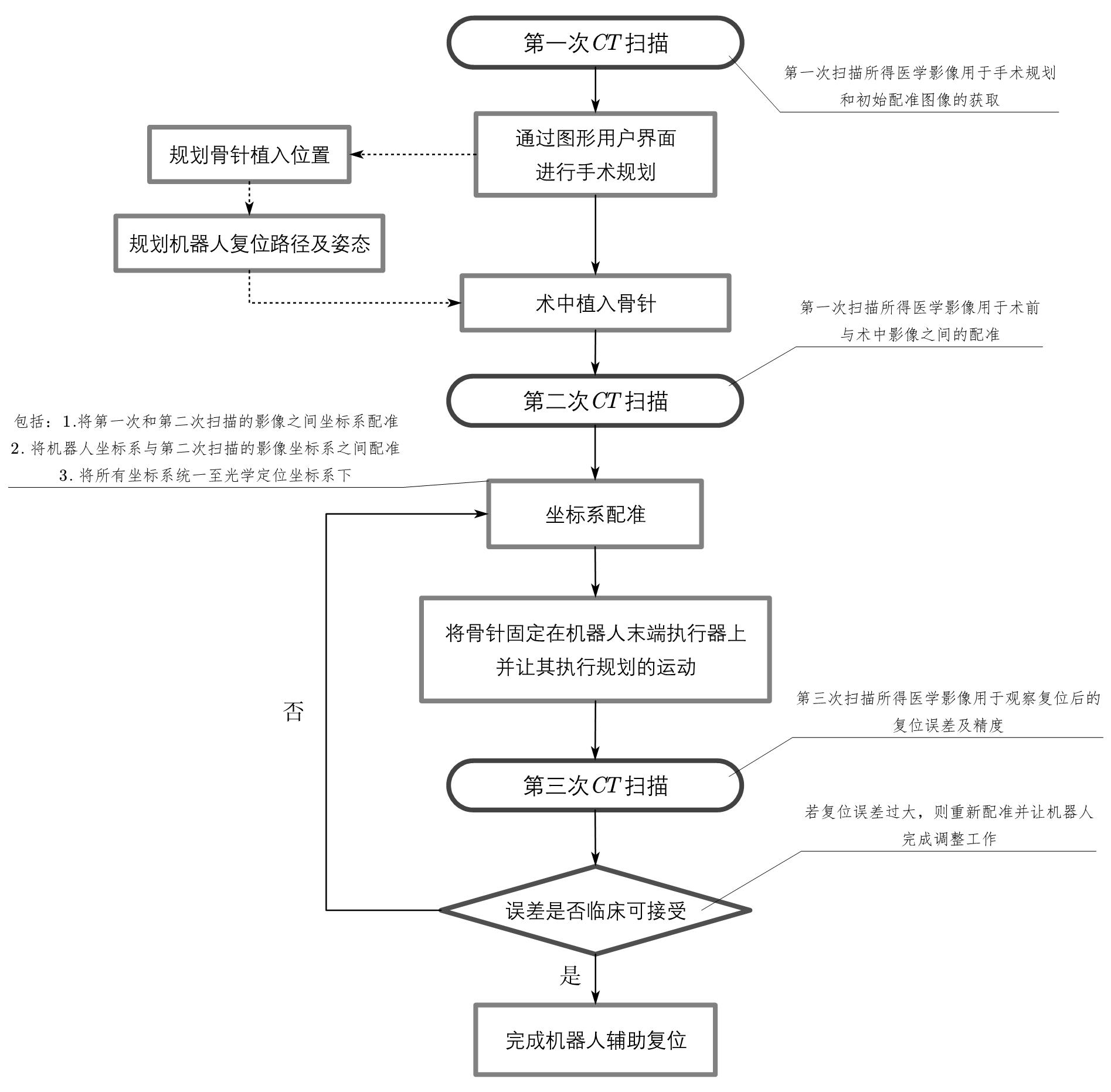
图5是该系统的工作流程图;
发明内容
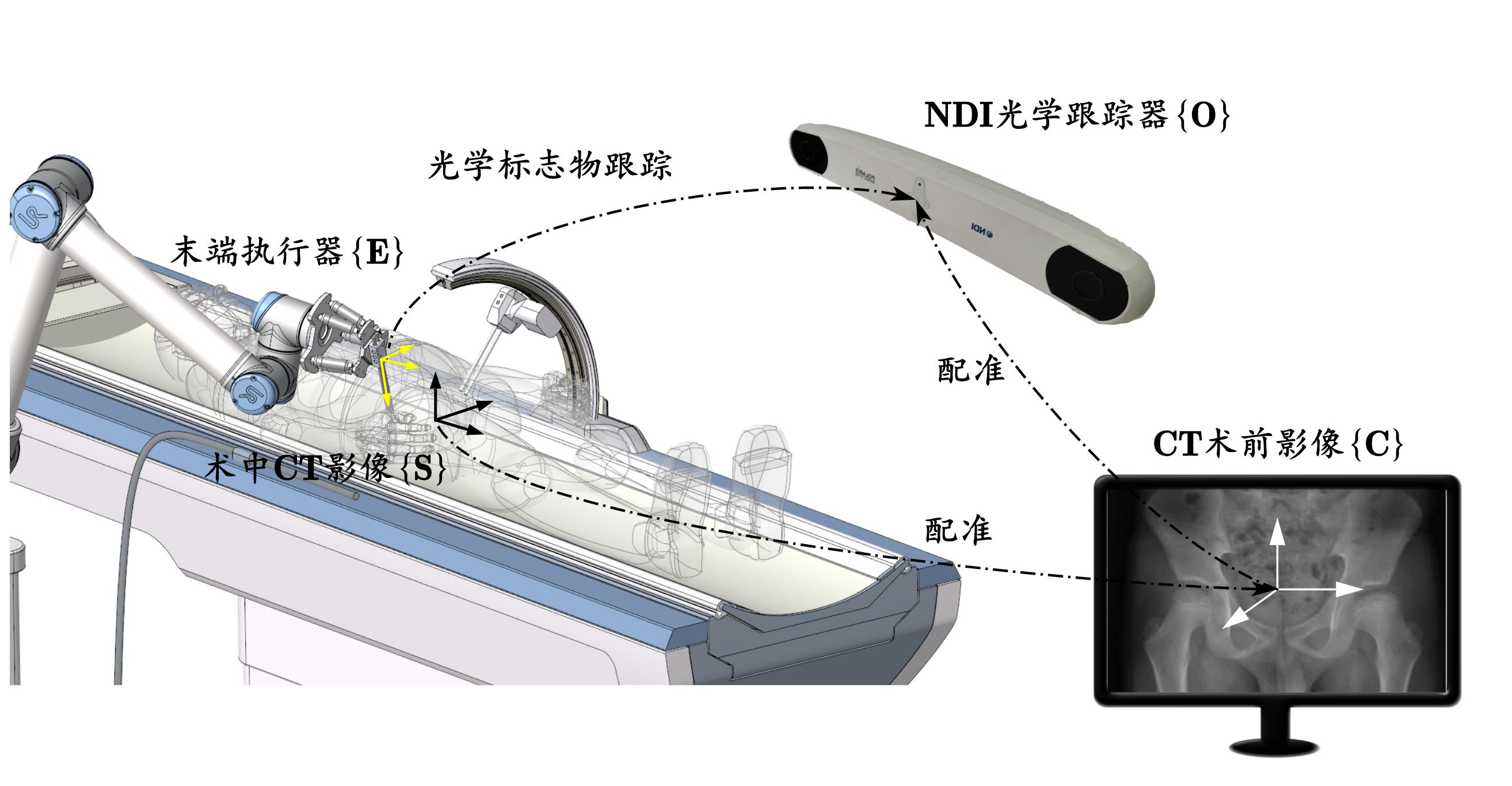
附图1展示了该系统各设备的组成和工作示意图。在执行复位任务前,医生在植入骨钉之后需要将骨钉固定在31带有反光球的骨钉固定盒上,同时也需要将非患侧的骨钉固定在42骨钉固定盒上。在完成第二次CT扫描之后,分别将两个固定盒安装3六自由度平台和4固定架上。此时医生使用光学探针完成病人骨盆关键点的获取后,计算机将通过算法完成病人实际骨盆解剖结构到医学影像直接的坐标系配准。
复位过程中,4固定架与植入非患侧骨盆的骨针相连,固定不动;3六自由度平台固定在2串联机械臂的末端,而31带有反光球标志物的骨针固定盒与32骨针一起被固定在3六自由度平台的另一端,3六自由度平台通过精巧的运动来操作骨针,完成术前计划的路径。随后医生取下31和42固定盒,对患者进行第三次CT扫描以确定复位后误差。如误差临床不可接受,则重新复位;若临床可接受,则完成复位操作。
图3中展示的串并联机械臂为一类结构通用的机械臂组合,在本专利中以商用的UR10协作机械臂(优傲,美国)和H-820六自由度平台(PI,美国)为例来介绍系统的组成及工作原理。
图4展示了在光学追踪下各个子坐标系之间的配准关系,配准方法在论文《肝肿瘤超声引导穿刺机器人的系统设计与控制》(林晓锋. 肝肿瘤超声引导穿刺机器人的系统设计与控制[D].中国科学院大学(中国科学院深圳先进技术研究院),2021.)中的2.3.2系统配准方法介绍中有详细介绍。
本专利所述系统共涉及四个主要坐标系,分别是光学定位坐标系{O}、CT术前影像坐标系{C}、机器人的末端执行器坐标系{E}和病人术中CT影像坐标系{S}。光学定位系统是一类位置测量系统。首先在需要跟踪的目标上附着一个无线的光学标记物。该标记物的形状和表面经过特殊处理,使得光学定位的激光发生器可以通过发射近红外光,来捕捉该类特殊标志物在自身定义坐标系下的位置。若同时附着数个标志物,形成一个标志物支架,则该定位系统可以同时 反馈该支架的位置和姿态信息。
本系统中使用到的标志物支架为三个被动反光球组成的局部坐标系,安装在31骨钉固定盒上。这意味着NDI光学跟踪器可以直接获取末端执行器{E}的位置和姿态。另外通过论文中所述基于迭代最近点的配准方法,可以利用骨盆上选定的几个标志点来开展骨盆术中CT影像{S}和术前CT影像{C}之间的配准。配准后可获得在光学定位坐标系{O}下表示的术中CT影像{S},和术前CT影像{C}之间的坐标转换关系,此时将可以用光学定位坐标系{O}来表示术前规划的路径等基于术前影像坐标系{C}定义的各个坐标。
另外,由于串并联机械臂的几何关系固定,则机器人坐标系本身可通过末端执行器坐标系{E}由安装的反光球局部坐标系被映射到光学定位坐标系{O}中。如此所有的坐标系将可以通过统一的坐标系{O}来进行表达,则可以让机器人执行手术计划中规划的运动了,同时也可以让机器人系统在术中及时把握复位误差而进行调整。
说明书附图

Leave a comment