
一种用于穿刺机器人的磁场驱动力反馈操纵设备 (中国发明专利CN113081275A)
技术领域
> 本申请属于交互设备技术领域,特别是涉及一种力反馈装置及其应用。 >
背景技术
所谓力反馈(Force Feedback),本来是应用于军事上的一种虚拟现实技术,它利用机械表现出的反作用力,将游戏数据通过力反馈设备表现出来,可以让用户身临其境地体验游戏中的各种效果。适用于虚拟会议、虚拟模型、维持路径规划、多媒体和分子模型化等诸多应用领域。力反馈技术能将游戏中的数据转化成用户可以感觉到的效果,例如道路上的颠簸或者转动方向盘感受到的反作用力,这些效果都是力反馈控制芯片“播放”出来的。
力反馈技术用于再现人对环境力觉的感知。在人的五大感官中力觉或触觉是人体感官中唯一具有双向传递信息能力的信息载体。借助于力觉交互设备,人们可以真实的按照人类的肢体语言进行人机自然互动和信息交流,通过应用力反馈设备,可以获得和触摸实际物体时相同的运动感,从而产生更真实的沉浸感。
力反馈装置则需要模拟真实物体受力以及产生反作用力的物理过程,一方面获取人通过短棒向虚拟物体施力状态信息,比如位置或着力的信息,同时利用反应被接触物体物理属性的参考模型计算其在接触或发生形变或可能产生的反作用力的大小和方向,由此产生力控信号,并通过装置中的执行器计算出来的反馈力作用到人手,从而在虚拟环境下实现触觉真实物体的触觉再现。
现有的力反馈装置无法满足穿刺手术的操纵自由度要求。同时由于结构复杂和自由度冗余,成本相对来说会比较高,不利于广泛推广应用。
发明内容
基于现有的力反馈装置无法满足穿刺手术的操纵自由度要求。同时由于结构复杂和自由度冗余,成本相对来说会比较高,不利于广泛推广应用的问题,本申请提供了一种力反馈装置及其应用。
2. 技术方案
为了达到上述的目的,本申请提供了一种力反馈装置,包括相互垂直设置的第一线圈组和第二线圈组,所述第一线圈组与所述第二线圈组形成的空间内设置有永磁体,所述永磁体设置于操纵杆内,所述永磁体与所述操纵杆固定连接。
本申请提供的另一种实施方式为:所述永磁体包括长轴,所述第一线圈组包括第一轴心线,所述第二线圈组包括第二轴心线,所述第一轴心线与所述第二轴心线形成轴心面,所述长轴初始位置与所述轴心面垂直,所述永磁体可绕所述第一轴心线旋转摆动,所述永磁体可绕所述第二轴心线旋转摆动,所述摆动通过万向节组件实现。
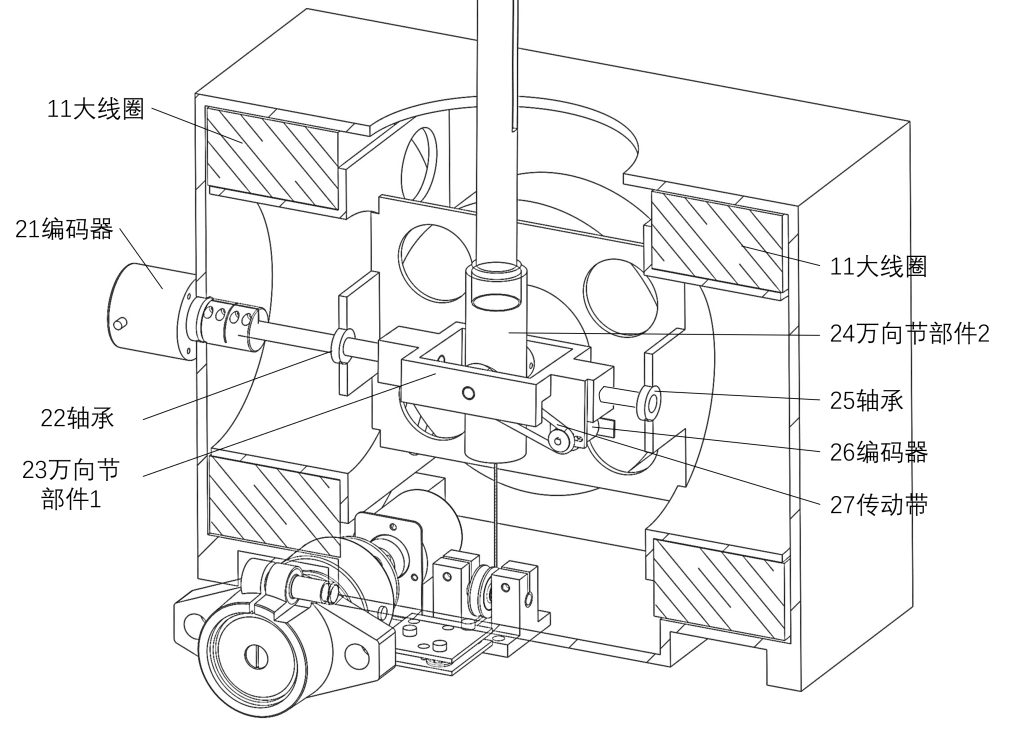
本申请提供的另一种实施方式为:所述万向节组件包括第一万向节部件,所述第一万向节部件通过第一轴承与骨架连接,所述第一万向节部件与第一编码器固定连接,第二万向节部件通过所述第二轴承固定于所述第一万向节部件上,所述第二万向节部件可在所述第一万向节部件上自由旋转,所述第二万向节部件上设置有传动带,所述传动带与第二编码器连接,所述第二编码器固定于所述第一万向节部件上。
本申请提供的另一种实施方式为:所述操纵杆包括第一管道,所述第一管道内设置有导向柱,所述导向柱与指板/指板副固定连接,所述导向柱与传动绳连接,所述传动绳穿过所述永磁体与力加载组件连接。
本申请提供的另一种实施方式为:所述力加载组件包括依次连接的卷簧、第一联轴器、磁滞制动器和卷线筒,所述卷线筒通过第二联轴器与第三编码器连接,所述传动绳通过第一引线组件和第二引线组件与所述卷线筒连接。
本申请提供的另一种实施方式为:所述第一线圈组设置于所述骨架上,所述第二线圈组设置于所述骨架上,所述骨架设置于基座内,所述操纵杆穿过所述基座,所述卷簧设置于所述基座上。
本申请提供的另一种实施方式为:所述操纵杆包括穿刺连接管道,所述穿刺连接管道设置于所述第一管道外部,所述第一管道为特氟龙管道。
本申请提供的另一种实施方式为:所述永磁体为空心圆柱型。
本申请还提供一种力反馈装置的应用,将所述的力反馈装置应用于穿刺机器人。
本申请提供的另一种实施方式为:所述力反馈装置与机器人通信连接,所述机器人与主手端通信连接。
3. 有益效果
与现有技术相比,本申请提供的力反馈装置及其应用的有益效果在于:
本申请提供的力反馈装置,为基于亥姆霍兹线圈磁场的力反馈设备。
本申请提供的力反馈装置,使用两组亥姆霍兹线圈和一个永磁体来对操纵杆施加两个方向的扭矩。永磁体在两组线圈的内径中,当给线圈施加激励电流时可以让线圈产生磁场,这样的均匀单向磁场可以让永磁体产生相应方向的扭矩。若控制电流的大小则可以控制磁场强度,从而改变扭矩的大小。当两组线圈同时产生磁场并作用在永磁体上时,根据磁场分别的大小可以合成出不同方向的扭矩。由于永磁体和操纵杆相互固定,在永磁体上施加的扭矩会直接转移给操纵杆,从而反馈到操作者的手上。
本申请提供的力反馈装置,采用的是长操纵杆的结构设计。该操纵杆初始位置垂直向上,符合穿刺手术中的一般情况,能让操作者更容易上手该装置的操作流程。
本申请提供的力反馈装置,其操纵杆的长度使得指板/指板副拥有较长的运动行程(大于15厘米)。在操纵者执行穿刺动作的时候,可以在该力反馈装置的单次行程中完成一个完整的穿刺动作,而无需短行程多次重复操作。
本申请提供的力反馈装置的应用,能够在完成手术所需基本自由度要求下为操作附加力反馈的功能,同时降低了制造该类设备的成本,也有利于降低整个穿刺手术机器人系统解决方案的成本。这间接促进了相关行业的从业者推出更加物美价廉的机器人方案,普及此类机器人辅助手术的手术模式。
附图
图1是本申请的力反馈装置结构示意图;
图2是本申请的力反馈装置内部结构示意图;
图3是本申请的力反馈装置半剖结构示意图;
图4是本申请的操纵杆结构示意图;
图5是本申请的操纵杆结构第二示意图;
图6是本申请的穿刺主手端系统示意图;
图7是本申请的力反馈原理示意图;
图8是本申请的力反馈控制原理示意图;
图中:1-第一线圈组、2-第二线圈组、3-永磁体、4-操纵杆、5-第一万向节部件、6-第一轴承、7-骨架、8-第一编码器、9-第二万向节部件、10-第二轴承、11-传动带、12-第二编码器、13-第一管道、14-导向柱、15-指板/指板副、16-传动绳、17-卷簧、18-第一联轴器、19-磁滞制动器、20-卷线筒、21-第二联轴器、22-第三编码器、23-第一引线组件、24-第二引线组件、25-基座、26-穿刺连接管道。














Leave a comment