


引言
当我们谈论显微手术或显微操作时,首先想到的可能是外科医生在极小的手术区域内进行精细操作的场景。这些手术通常需要医生具备极高的技术水平和稳定的手部控制力,因为他们需要在极小的视野内操作微小的器官、血管或神经。然而,笔者在博士期间开发的显微3D视觉系统由其开创性的应用,能为微创手术和显微操作带来前所未有的精度、安全性及认知扩展。
什么是显微3D视觉系统?显微3D视觉系统是一项将机器3D视觉与双目显微镜相结合的创新技术。它的核心目标是为外科医生提供清晰、立体的手术视野,使他们能从不同的角度观察手术目标,从而指定下一步手术操作和计划,让显微操作更加精准和安全。另外,该系统所产生的点云信息可以为配套的导航系统所用。通过自主研发的人工智能算法和先进的可视化技术,导航系统能在机器3D视觉的基础上提供前所未有的认知辅助,帮助术者快速把握和认识操作对象的透视结构和状态。
显微3D视觉系统如何辅助手术或显微操作?
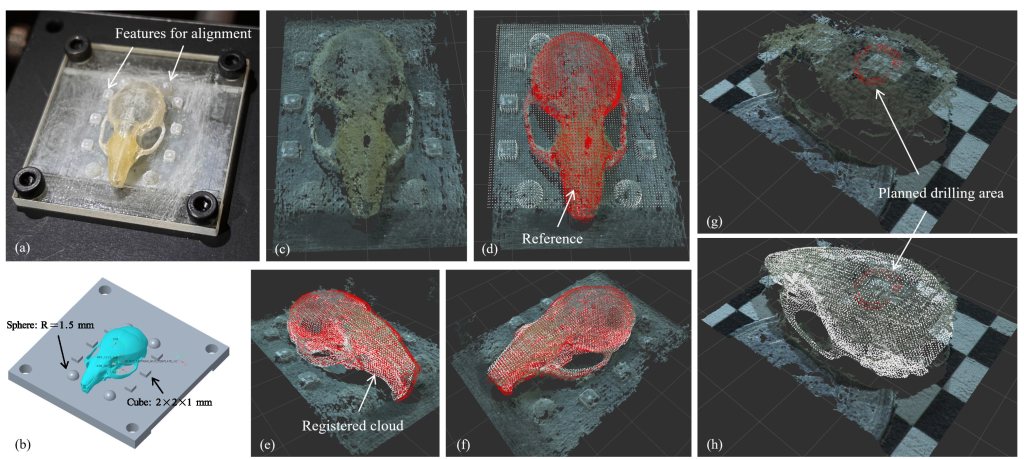
首先,显微3D视觉系统可以生成物体表面的高精度点云信息。如下面的图片和视频所示。

视频中展示了小鼠开颅手术中的实时3D视觉可视化效果。该手术通过微型钻头在小鼠颅骨上钻开一个圆形窗口(颅窗),其中该部分的颅骨厚度约为0.27 ~ 0.33 mm。该手术的后续操作包括在脑组织中植入迷你脏器,使用透明玻片封上颅窗并观察迷你脏器的生长过程。该项操作最大的挑战在于判断颅窗在环形圈上的完成度。由于该部分骨组织过于薄,使其有呈现半透明的特性。另外,手持微型钻头的力或震动反馈相对于钻头的重量而言很小,难以形成有效参考。基于以上两个主要原因,无论是机器人远程操作还是自动化操作都面临着重重困难。
显微3D视觉系统的研发不单止能够观察到2D显微图像所没有的深度信息,同时也可以很明显地反映出组织变形中产生的位移。该两项信息通常是术者在手术过程中会忽略的,但却是导航系统中解决机器人标定、术前医学影像配准和被操作物体状态估计的关键。笔者在博士期间致力于充分利用显微手术或操作中的深度信息,相关成果已经或准备发表多篇高水平论文。

当前,原型机系统已经能够以30 Hz的实时性、0.10 mm的精度术中实时成像,无论是显微机器人的远程操作还是导航系统所需,均已满足设计要求。实验结果表明该系统在实时性和精度的综合评价上领先于世界上任何一个同款的显微3D系统实验室原型机,具有高度的技术先进性和应用前景。
