


導入
マイクロサージェリーやマイクロマニピュレーションについて考えるとき、多くの場合、最初に頭に浮かぶイメージは、外科医が非常に狭い領域内で繊細な手術を行うことです。外科医は限られた視野内で小さな臓器、血管、または神経を操作しなければならないため、これらの手術では通常、非常に高度な技術スキルと安定した手の制御が要求されます。しかし、私の博士課程の研究中に開発された顕微鏡 3D ビジョン システムは、低侵襲手術や顕微操作に前例のない精度、安全性、認知機能の強化を提供する画期的なアプリケーションを導入しました。
3D 顕微鏡ビジョン システムとはマシン 3D ビジョンと双眼顕微鏡を組み合わせた革新的なテクノロジーです。主な目標は、外科医に手術野の明確な 3 次元ビューを提供し、さまざまな角度からターゲットを観察し、次のステップをより正確かつ安全に計画できるようにすることです。さらに、システムによって生成された点群データをナビゲーション システムに統合できます。このナビゲーション システムは、独自の人工知能アルゴリズムと高度な視覚化テクノロジーの使用を通じて、機械の 3D ビジョンに基づいた比類のない認知支援を提供し、外科医が手術対象の構造情報と状態情報を迅速に理解して認識できるように支援します。
3D 顕微鏡ビジョン システムは手術や顕微操作をどのように支援しますか
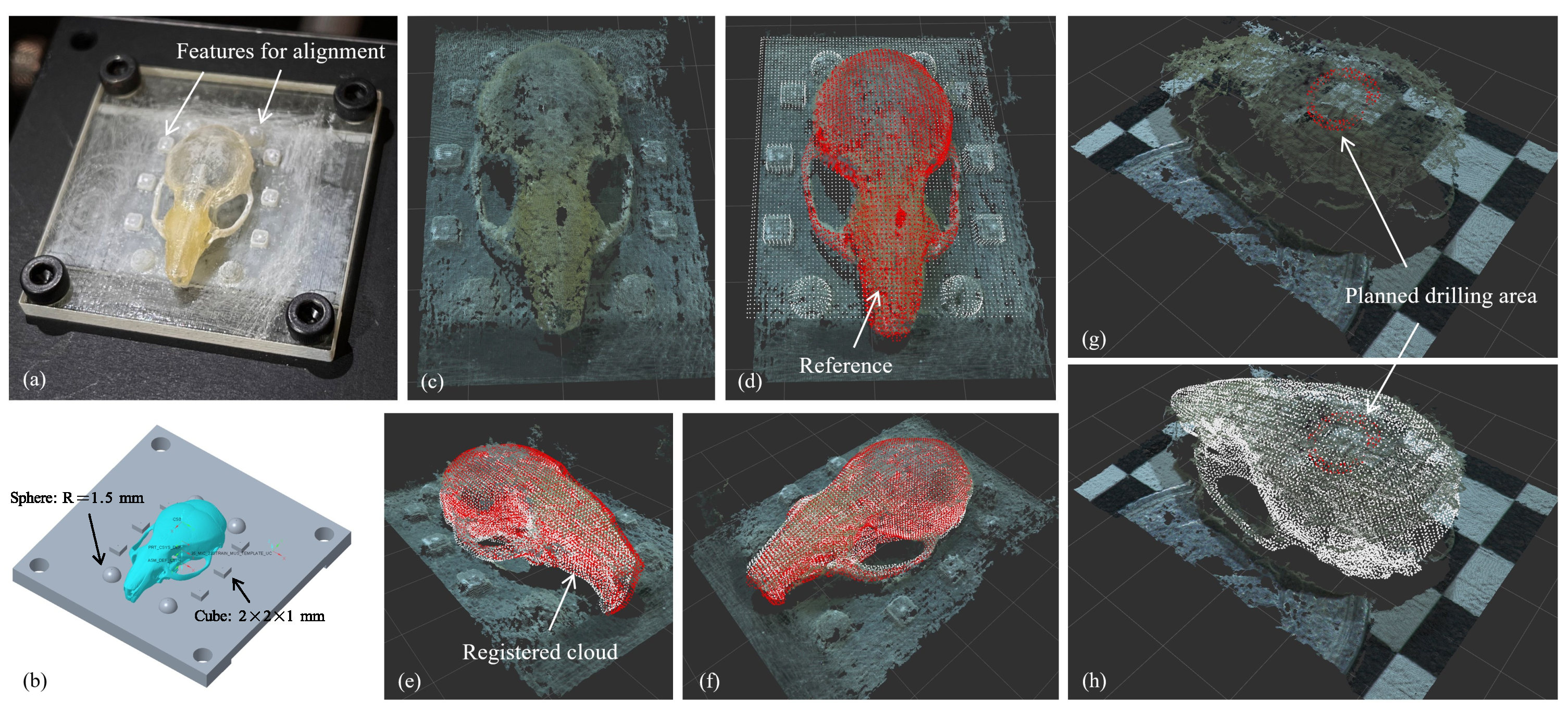
まず、3D 顕微鏡ビジョン システムは、以下の画像とビデオに示すように、物体の表面の高精度の点群データを生成できます。
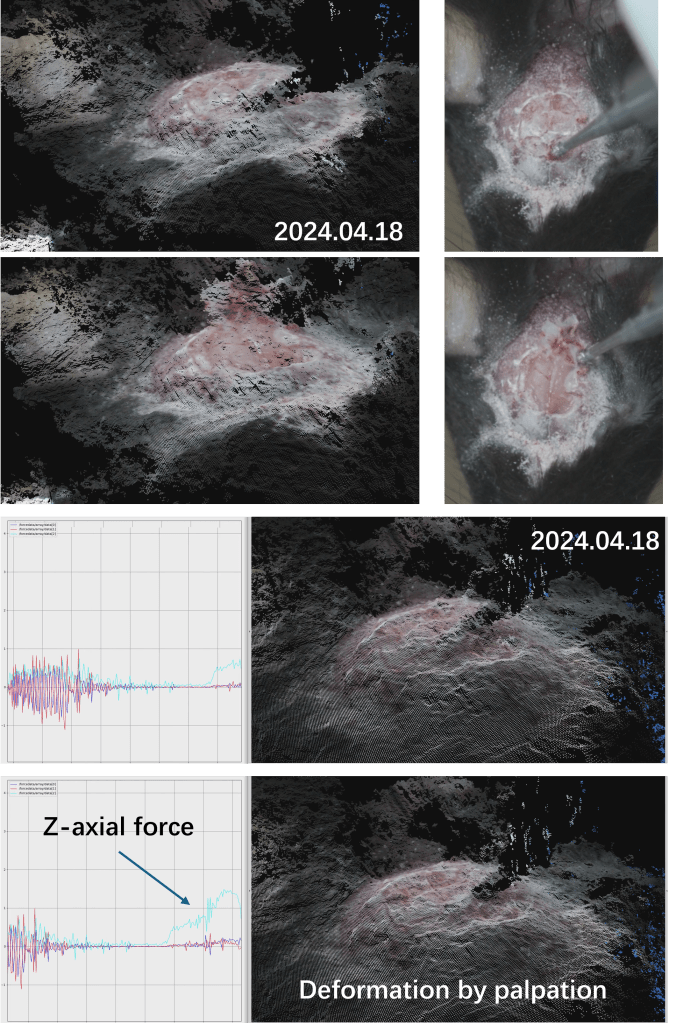
このビデオでは、マウス開頭手術中のリアルタイム 3D 視覚フィードバックを示しています。この手術では、マイクロドリルを使用してマウスの頭蓋骨に円形の窓を開けます。この領域の頭蓋骨の厚さは約 0.27 ~ 0.33 mm です。この手順のその後のステップには、脳組織への小型臓器の移植、透明なガラスカバーで頭蓋窓の密閉、および小型臓器の成長の観察が含まれます。最大の課題は、円形頭蓋窓の完全性を評価することにあります。頭蓋骨組織は薄いため、半透明になる傾向があります。さらに、マイクロドリルを取り扱うときの力や振動のフィードバックはドリルの重量に比べて微妙すぎるため、信頼できる基準として使用することが困難になります。これら 2 つの要因は、ロボットによる遠隔制御と自動化された操作の両方にとって重大な課題を引き起こします。
3D 顕微鏡ビジョン システムの開発により、従来の 2D 顕微鏡画像には存在しない深さ情報の視覚化が可能になるだけでなく、組織の変形に起因する変位も明確に反映します。これら 2 種類の情報は、手術中にオペレータによって見落とされることがよくありますが、ナビゲーション システムがロボットのキャリブレーション、術前の医用画像位置合わせ、および対象物の状態の推定に対処するためには重要です。博士課程の研究では、顕微手術や顕微操作で深さ情報を最大限に活用することに重点を置き、これらの結果に基づいて複数のハイレベルな論文がすでに出版されているか、出版準備中です。
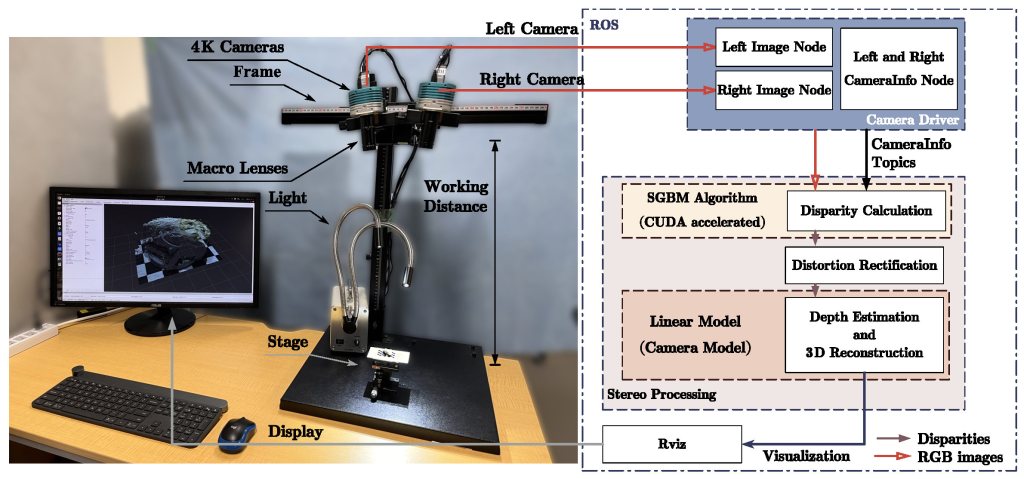
現在のプロトタイプ システムは、30 Hz で 0.10 mm の精度でリアルタイムの術中イメージングが可能です。マイクロロボットの遠隔制御とナビゲーション システムのニーズの両方の設計要件を満たします。実験結果は、このシステムがリアルタイム性能と精度の点で世界中の他のどのプロトタイプ 3D 顕微鏡システムよりも優れていることを示し、高いレベルの技術進歩と有望な応用可能性を示しています。