
显微三维导航系统(日本专利申请项目)
这是一个围绕显微手术导航构建的研究与专利申请项目。当前页面仅公开项目层面的技术路线、用途和阶段性结果,不公开尚未发表的日本专利申请文件全文。
项目概述
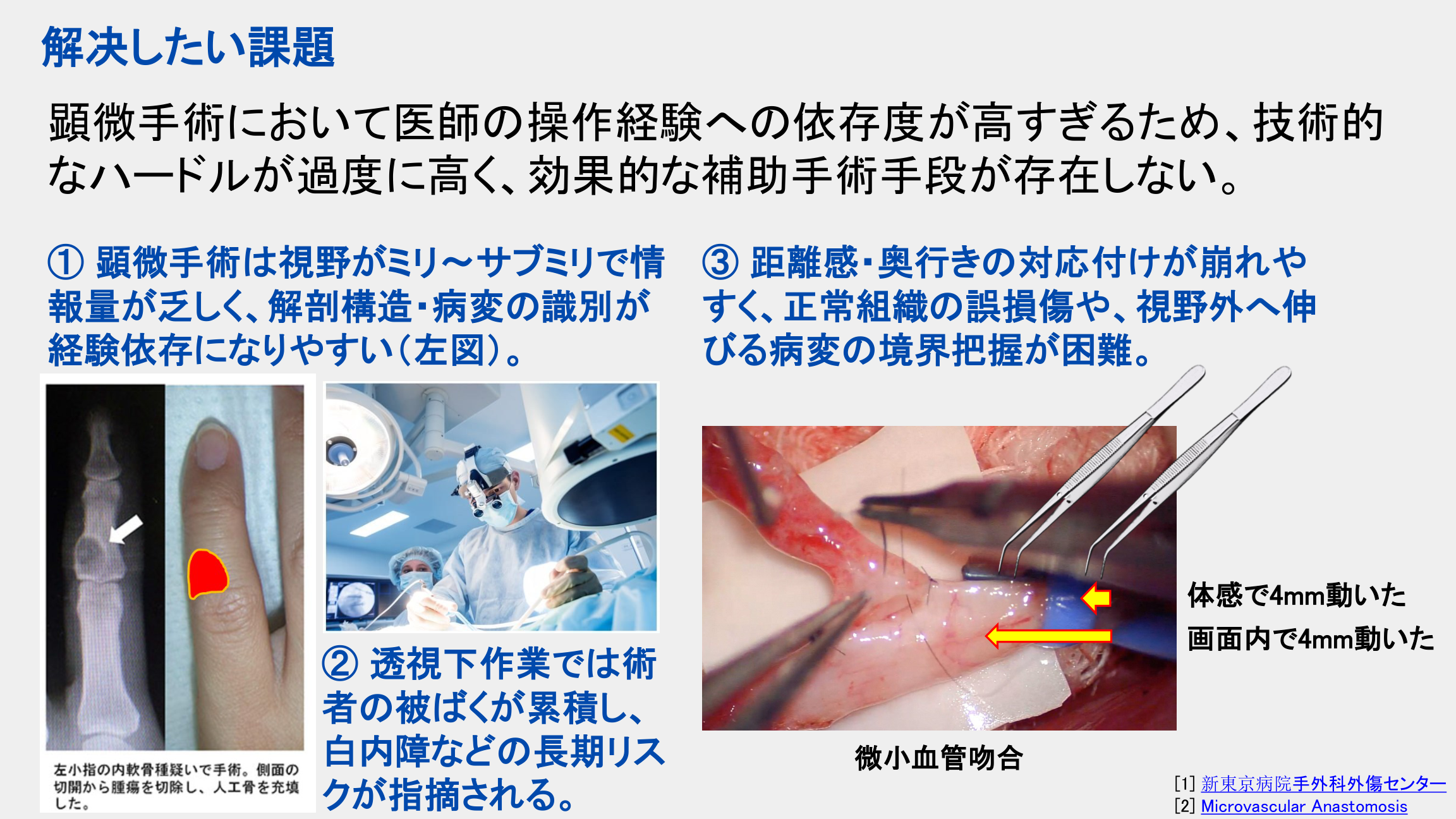
这个项目试图解决显微手术中长期存在的一个核心痛点:术者在极小视野下高度依赖个人经验,既难以稳定识别解剖结构和病变边界,也难以在有限视野中持续建立三维空间感。
相比传统术中导航系统,这一方案不是把大型标记框架或独立跟踪系统直接缩小,而是重新设计适合微细操作场景的导航架构,把可视光图像、近红外结构信息和术具追踪信息整合到同一视野中。
三条核心技术路线
- 分光式立体视:利用不同波长承担不同功能,让可视光负责显示与 AI 分析,让近红外同时承担结构化照明和术具追踪,从而在同一套成像系统里兼顾“看清”和“定位”。
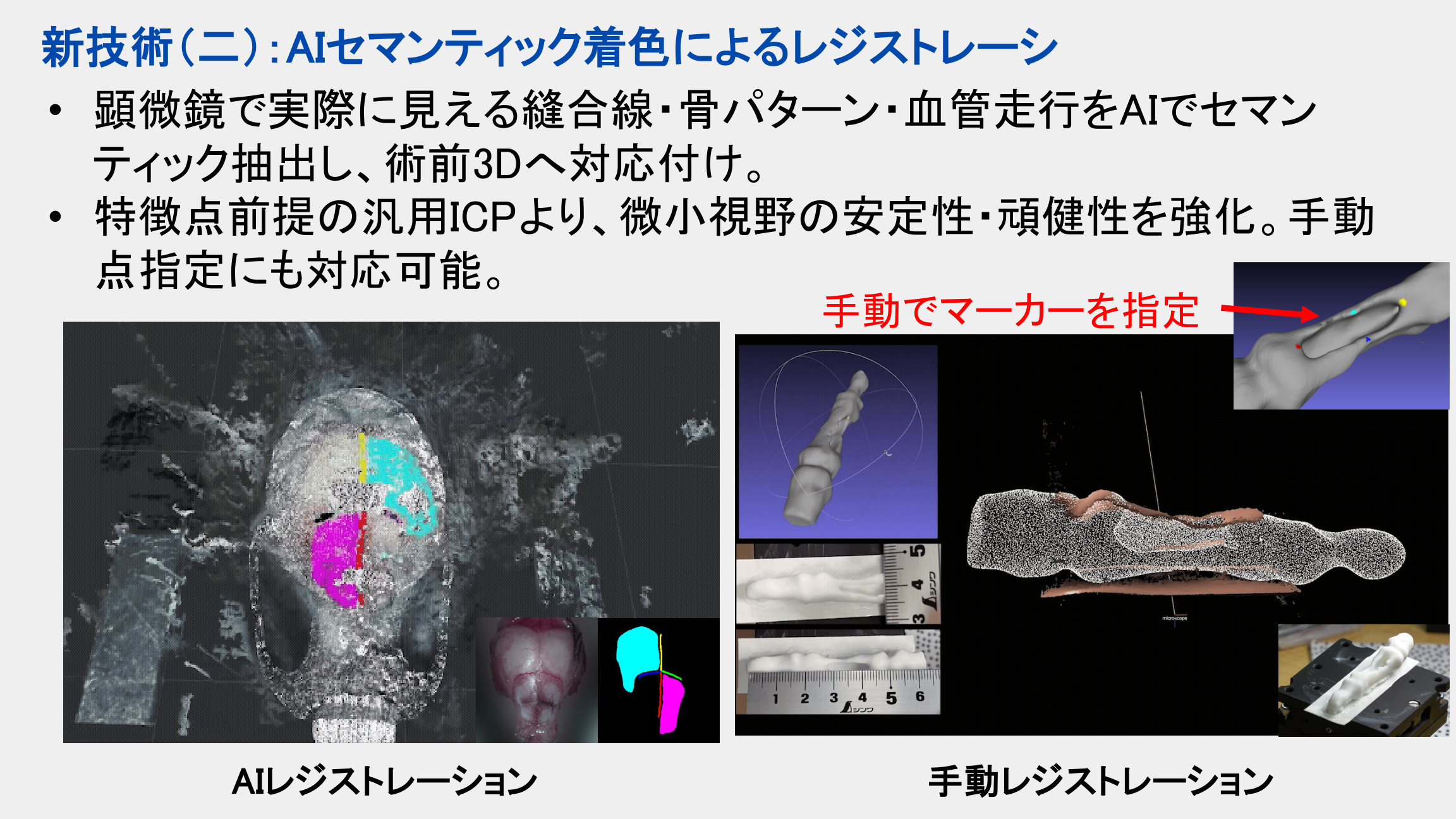
- AI 语义配准:从显微镜下真实可见的缝合线、骨表面纹理或血管走行中抽取语义特征,并与术前三维模型进行对应,提高微小视野下的稳定性与鲁棒性。
- 光纤术具追踪:把极细光纤嵌入术具,使术具尖端能够在显微操作域中被高信噪比追踪,避免传统大尺寸标记在微细场景中遮挡视野或难以布置的问题。
为什么这条路线有意义
- 它试图把传统 Type A 导航系统的术具追踪能力和 Type B 系统的真实场景可视化能力放到同一套显微场景方案里。
- 它面向的是传统导航系统最难覆盖的微细操作尺度,而不是常规开放手术或普通器械尺度。
- 它同时兼顾临床导航、研究平台和技能评估场景,因而既有潜在转化价值,也有实验系统价值。
当前进展
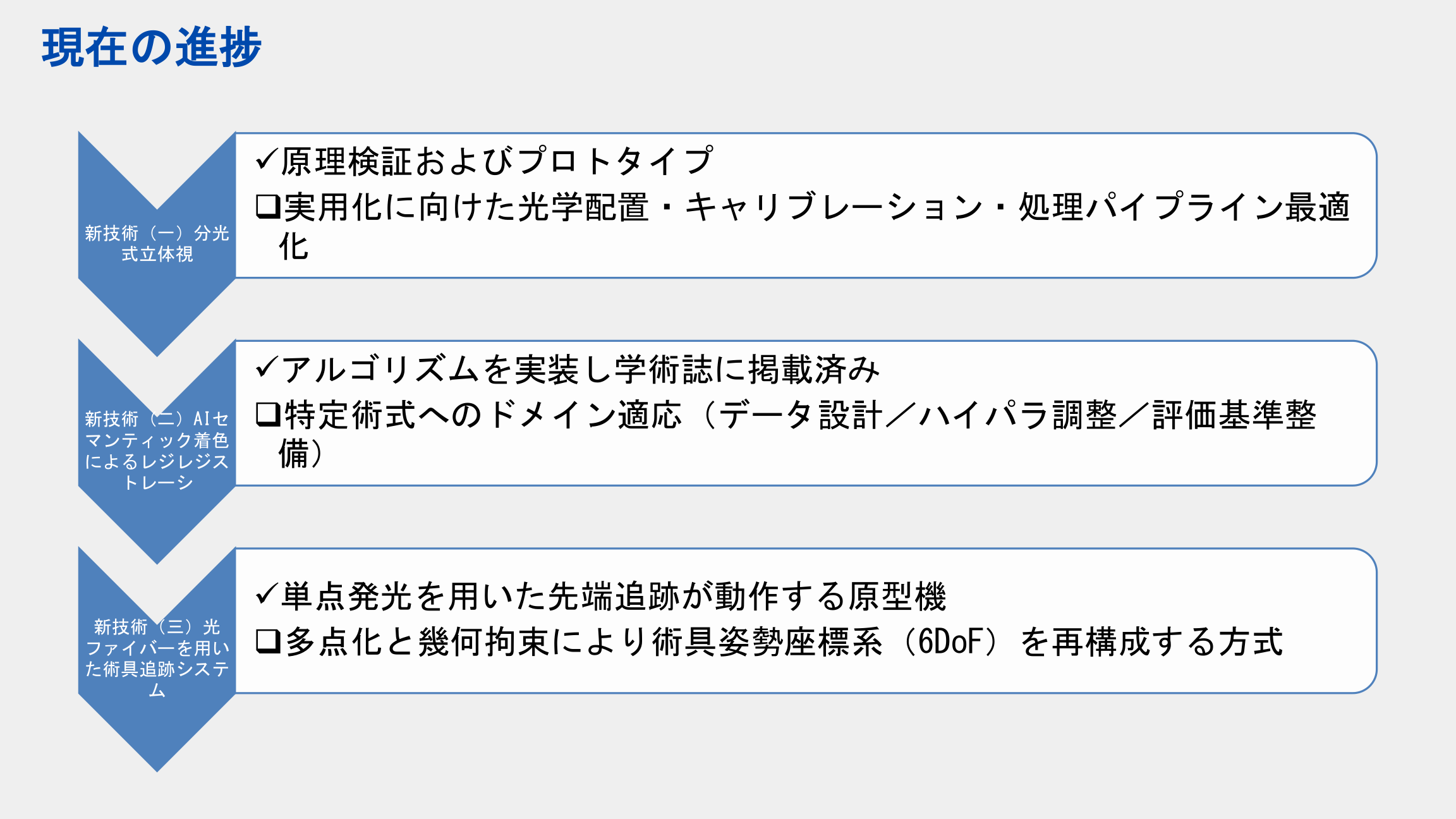
- 分光式立体视方向已经完成原理验证和原型机,下一步重点在光学配置、标定和处理流程优化。
- AI 配准方向已经完成算法实现并形成论文成果,后续将继续做术式适配、数据设计和评价标准整理。
- 光纤术具追踪方向已经完成单点发光原型,下一阶段将进一步扩展到多点约束和更完整的姿态重建。
公开边界说明
该项目对应的日本专利申请尚未公开,因此这里不提供出愿受理文件或申请文本下载,也不披露未公开申请中的编号和完整权利要求。当前页面仅整理已经可以安全对外展示的项目级说明和补充幻灯片。
补充图示



Leave a Reply