
Category: Uncategorized
-
显微三维导航系统(日本专利申请项目)
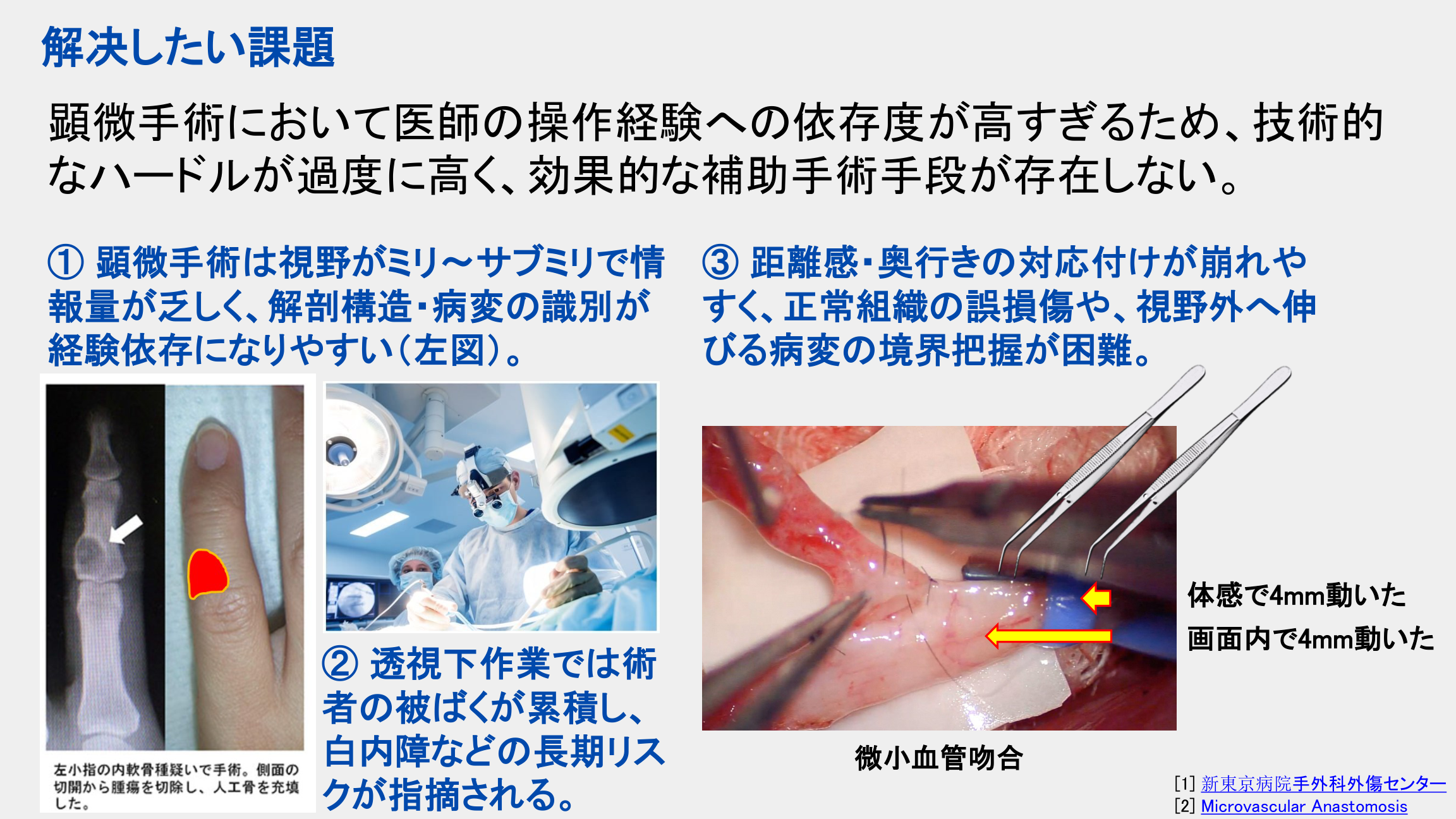
显微三维导航系统(日本专利申请项目) 这是一个围绕显微手术导航构建的研究与专利申请项目。当前页面仅公开项目层面的技术路线、用途和阶段性结果,不公开尚未发表的日本专利申请文件全文。 项目概述 这个项目试图解决显微手术中长期存在的一个核心痛点:术者在极小视野下高度依赖个人经验,既难以稳定识别解剖结构和病变边界,也难以在有限视野中持续建立三维空间感。 相比传统术中导航系统,这一方案不是把大型标记框架或独立跟踪系统直接缩小,而是重新设计适合微细操作场景的导航架构,把可视光图像、近红外结构信息和术具追踪信息整合到同一视野中。 三条核心技术路线 分光式立体视:利用不同波长承担不同功能,让可视光负责显示与 AI 分析,让近红外同时承担结构化照明和术具追踪,从而在同一套成像系统里兼顾“看清”和“定位”。AI 语义配准:从显微镜下真实可见的缝合线、骨表面纹理或血管走行中抽取语义特征,并与术前三维模型进行对应,提高微小视野下的稳定性与鲁棒性。光纤术具追踪:把极细光纤嵌入术具,使术具尖端能够在显微操作域中被高信噪比追踪,避免传统大尺寸标记在微细场景中遮挡视野或难以布置的问题。 为什么这条路线有意义 它试图把传统 Type A 导航系统的术具追踪能力和 Type B 系统的真实场景可视化能力放到同一套显微场景方案里。它面向的是传统导航系统最难覆盖的微细操作尺度,而不是常规开放手术或普通器械尺度。它同时兼顾临床导航、研究平台和技能评估场景,因而既有潜在转化价值,也有实验系统价值。 当前进展 分光式立体视方向已经完成原理验证和原型机,下一步重点在光学配置、标定和处理流程优化。AI 配准方向已经完成算法实现并形成论文成果,后续将继续做术式适配、数据设计和评价标准整理。光纤术具追踪方向已经完成单点发光原型,下一阶段将进一步扩展到多点约束和更完整的姿态重建。 公开边界说明 该项目对应的日本专利申请尚未公开,因此这里不提供出愿受理文件或申请文本下载,也不披露未公开申请中的编号和完整权利要求。当前页面仅整理已经可以安全对外展示的项目级说明和补充幻灯片。 补充图示
-

放射粒子植入穿刺机器人(CN110548218A)
放射粒子植入穿刺机器人(中国发明专利 CN110548218A) 一种放射粒子植入穿刺机器人,包括超声外设模块、针头推进模块、针头仓储模块和针头递送模块。该方案的重点在于把“自动换针”纳入整体机器人流程,从而减少手术中的人工往返换针,提高粒子植入效率。 专利信息 公开号CN110548218A申请号201910808516.1申请日2019.08.29公布日2019.12.10发明名称放射粒子植入穿刺机器人申请人中国科学院深圳先进技术研究院发明人滕皋军、周寿军、林晓锋、王澄、张毅、温铁祥、陆建分类号A61M 36/04;A61B 34/30 核心结构与创新点 超声外设模块负责末端穿刺针夹持,并可在换针位置与穿刺位置之间切换。针头推进模块同时承担轴向推进/拔出与姿态旋转两种动作,是整机运动切换的关键。针头仓储模块把多根穿刺针以仓储位方式组织起来,支持自动轮转到取针位置。针头递送模块通过电动夹与水平传送组件,把新针从仓储模块送入自动夹持机构。粒子推进模块在完成换针后继续接管粒子推送与力反馈,使穿刺、留置、换针形成完整链路。 技术背景 该专利面向恶性肿瘤粒子植入治疗场景。传统流程中,肿瘤往往需要多个部位穿刺植入放射性粒子,而每次植入又需要更换穿刺针,导致术者在手术中频繁往返,延长手术时间,也不利于患者恢复。 这项发明的切入点很明确:不是单纯改进某个穿刺执行器,而是把“自动换针”作为系统级问题来解决,把针仓、夹持、递送、推进和粒子装填整合在同一套机器人结构中。 自动换针与植入流程 完成一次粒子植入后,针头推进模块将超声外设模块旋转到换针位置。针头仓储模块把下一个装有穿刺针的针存储仓送到针头传递位置。针头递送模块的电动夹夹取新针,并沿轴向将其送入自动夹持组件。系统重新旋转到穿刺位置,粒子推进模块再完成粒子推送与力反馈检测。 专利价值 从专利文本来看,这套方案的核心价值在于把穿刺针的传送、转移、夹取和复位全部机构化、自动化,避免医生在每次植入后手动换针。对放射粒子植入这类重复性高、节奏要求强的手术场景,这种系统设计对提高手术效率很有意义。 对我自己的研究路径来说,这也是一个很典型的医疗机器人系统化设计案例:它不仅关注执行端,也把耗材管理、模块切换和术中工作流一并纳入设计。 附图资料