
Category: Uncategorized
-
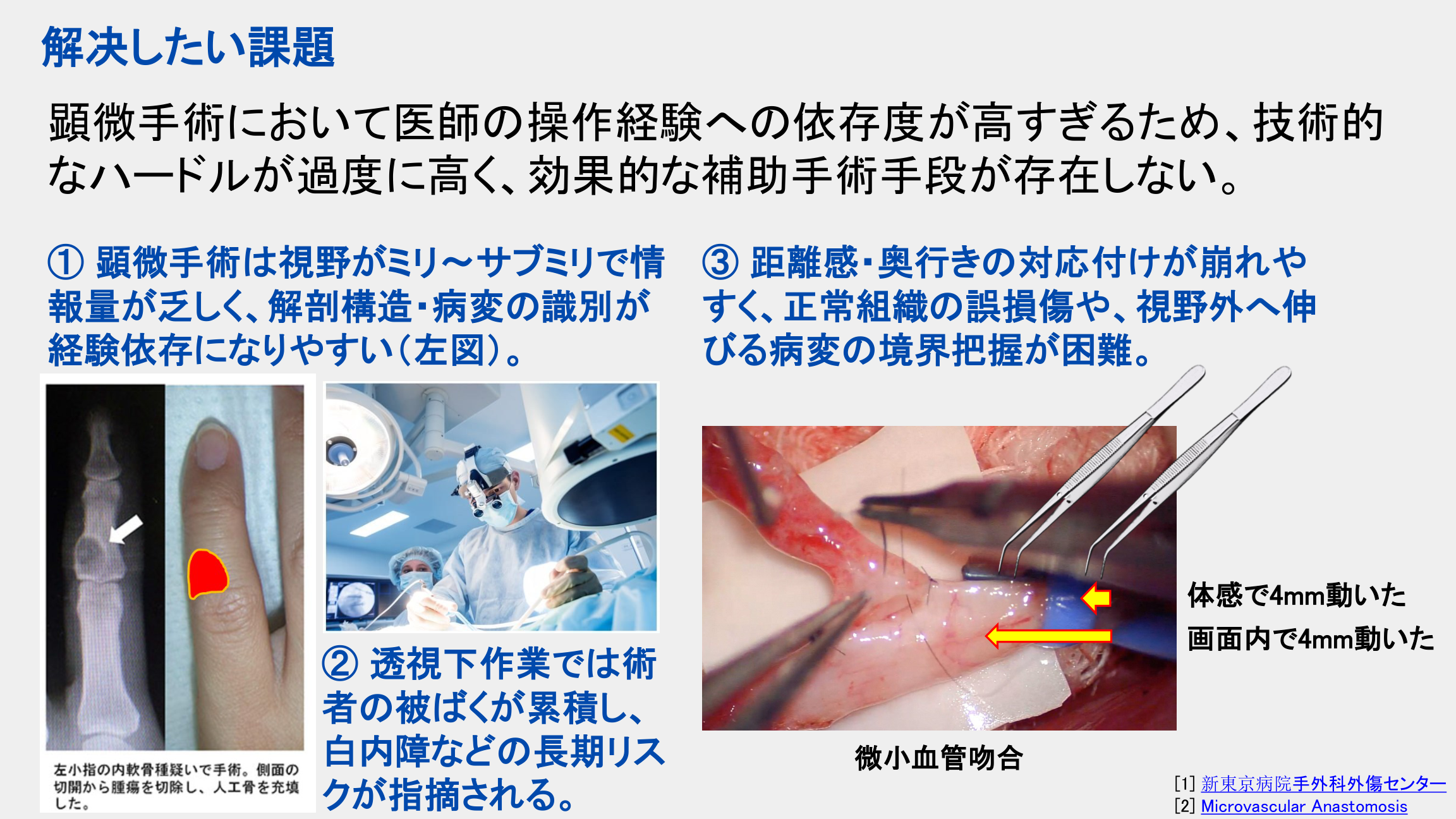
顕微鏡下3Dナビゲーションシステム(日本特許出願プロジェクト)
微細3Dナビゲーションシステム(日本特許出願プロジェクト) これは、顕微手術ナビゲーションを中心に構築された研究および特許出願プロジェクトです。現在のページでは、プロジェクトレベルでの技術的ルート、用途、段階的結果のみが開示されており、未公開の日本特許出願書類の全文は開示されていません。 プロジェクト概要 このプロジェクトは、顕微手術における長年の問題点の解決を試みています。それは、外科医は非常に狭い視野での個人的な経験に大きく依存しているということです。解剖学的構造や病変の境界を安定して識別することは難しく、限られた視野の中で三次元の空間感覚を継続的に確立することは困難です。 従来の術中ナビゲーション システムと比較して、このソリューションは大きなマーキング フレームや独立した追跡システムを直接縮小するのではなく、顕微手術シナリオに適したナビゲーション アーキテクチャを再設計し、可視光画像、近赤外構造情報、手術器具追跡情報を同じ視野に統合します。 3つのコアテクニカルルート 分光立体視: 異なる機能を実行するために異なる波長が使用されます。可視光は表示と AI 分析を担当し、近赤外線は構造化照明とツール追跡を同時に担当するため、同じイメージング システムで「鮮明な視界」と「位置決め」の両方が考慮されます。AI セマンティック位置合わせ: 顕微鏡下で実際に見える縫合糸、骨表面の質感、血管経路からセマンティック特徴を抽出し、術前の 3 次元モデルにマッピングすることで、狭い視野での安定性と堅牢性を向上させます。光ファイバーツールの追跡: 極細の光ファイバーを手術ツールに埋め込むことで、顕微鏡手術野で高い信号対雑音比で手術ツールの先端を追跡できるようになり、従来の大型マーカーが視野を妨げたり、繊細なシーンに配置するのが困難であったりする問題を回避できます。 なぜこのルートが理にかなっているのか 従来のタイプ A ナビゲーション システムのツール追跡機能とタイプ B システムの実際のシーン視覚化機能を同じ微視的シーン ソリューションに組み込むことを試みます。従来の開腹手術や通常の機器スケールではなく、従来のナビゲーション システムでカバーするのが最も困難な微細な手術スケールを対象としています。臨床ナビゲーション、研究プラットフォーム、スキル評価シナリオを同時に考慮しているため、潜在的な翻訳価値と実験システム価値の両方を備えています。 現在の進捗状況 分光立体視方向の原理検証と試作が完了した。次のステップでは、光学構成、キャリブレーション、および処理プロセスの最適化に焦点を当てます。AI位置合わせ方向のアルゴリズム実装が完了し、論文結果が形成されました。今後、手術適応、データ設計、評価基準の検討が継続される予定です。方向を追跡する光ファイバーツールは単一点照明のプロトタイプを完成させており、次の段階ではさらに複数点の制約とより完全な姿勢の再構成に拡張される予定です。…
-

放射性シード植込み穿刺ロボット(CN110548218A)
放射性粒子注入穿刺ロボット(中国発明特許CN110548218A) 放射性粒子インプラント穿刺ロボットは、超音波周辺モジュール、針前進モジュール、針保管モジュール、および針送達モジュールを含む。このソリューションの焦点は、ロボットプロセス全体に「自動針交換」を組み込むことにより、手術中の手動による針交換を減らし、粒子注入の効率を向上させることです。 特許情報 パブリックアカウントCN110548218A申請番号201910808516.1申請日2019.08.29発表日2019.12.10発明の名称放射性粒子注入穿刺ロボット申請者中国科学院深セン先進技術研究所発明者テン・ガオジュン、ジョウ・ショウジュン、リン・シャオフェン、ワン・チェン、チャン・イー、ウェン・ティシャン、ルー・ジャン分類番号A61M 36/04; A61B 34/30 コア構造と革新ポイント 超音波周辺モジュールは末端穿刺針を保持し、針交換位置と穿刺位置を切り替えることができます。針前進モジュールは軸方向の前進・抜去と姿勢回転の両方を担当し、機械全体の動きを切り替える鍵となります。針保管モジュールは、複数の穿刺針を保管場所に整理し、針回収位置への自動回転をサポートします。針送出モジュールは、電気クランプと水平移動コンポーネントを使用して、新しい針を保管モジュールから自動クランプ機構に送ります。粒子推進モジュールは、針の交換が完了した後も粒子の推進と力のフィードバックを引き継ぎ、穿刺、留置、針交換の完全なリンクを形成します。 技術的背景 この特許は、悪性腫瘍に対する粒子移植治療シナリオを目的としています。従来の手術では、腫瘍の複数箇所への穿刺と放射性シードの埋め込みが必要になることが多く、埋め込みごとに穿刺針の交換が必要となるため、外科医は手術中に頻繁に往復することになり、手術時間が長くなり、患者の回復にはつながりません。 本発明の入り口は明らかである。特定の穿刺アクチュエータを単に改良するのではなく、システムレベルの問題として「自動針交換」を解決し、針の倉庫、クランプ、送達、前進、および粒子の装填を同じロボット構造に統合する。 自動針交換および植込みプロセス 1 回のシード移植が完了すると、針前進モジュールは超音波周辺モジュールを針交換位置まで回転させます。針保管モジュールは、穿刺針を含む次の針保管ビンを針移送位置に送ります。針送出モジュールの電動クランプが新しい針を拾い上げ、軸方向に自動クランプアセンブリに送り込みます。システムは穿刺位置まで再回転し、粒子推進モジュールは粒子の押し出しと力フィードバックの検出を完了します。 特許価値 特許文から判断すると、このソリューションの中心的な価値は、穿刺針の伝達、移動、クランプ、位置変更を制度化して自動化し、これにより医師が植込みのたびに手動で針を交換する必要をなくすことである。放射性粒子の移植など、反復性が高くリズム要件が高い手術シナリオの場合、このシステム設計は手術効率を向上させるのに非常に意味があります。 私自身の研究経路にとって、これは医療ロボットの体系的な設計の非常に典型的なケースでもあります。実行エンドに焦点を当てるだけでなく、消耗品の管理、モジュールの切り替え、術中のワークフローも設計に組み込まれています。 画像情報