
Author: 林晓锋
-
力覚フィードバック装置およびその応用(CN113081275A / WO2022204869A1)
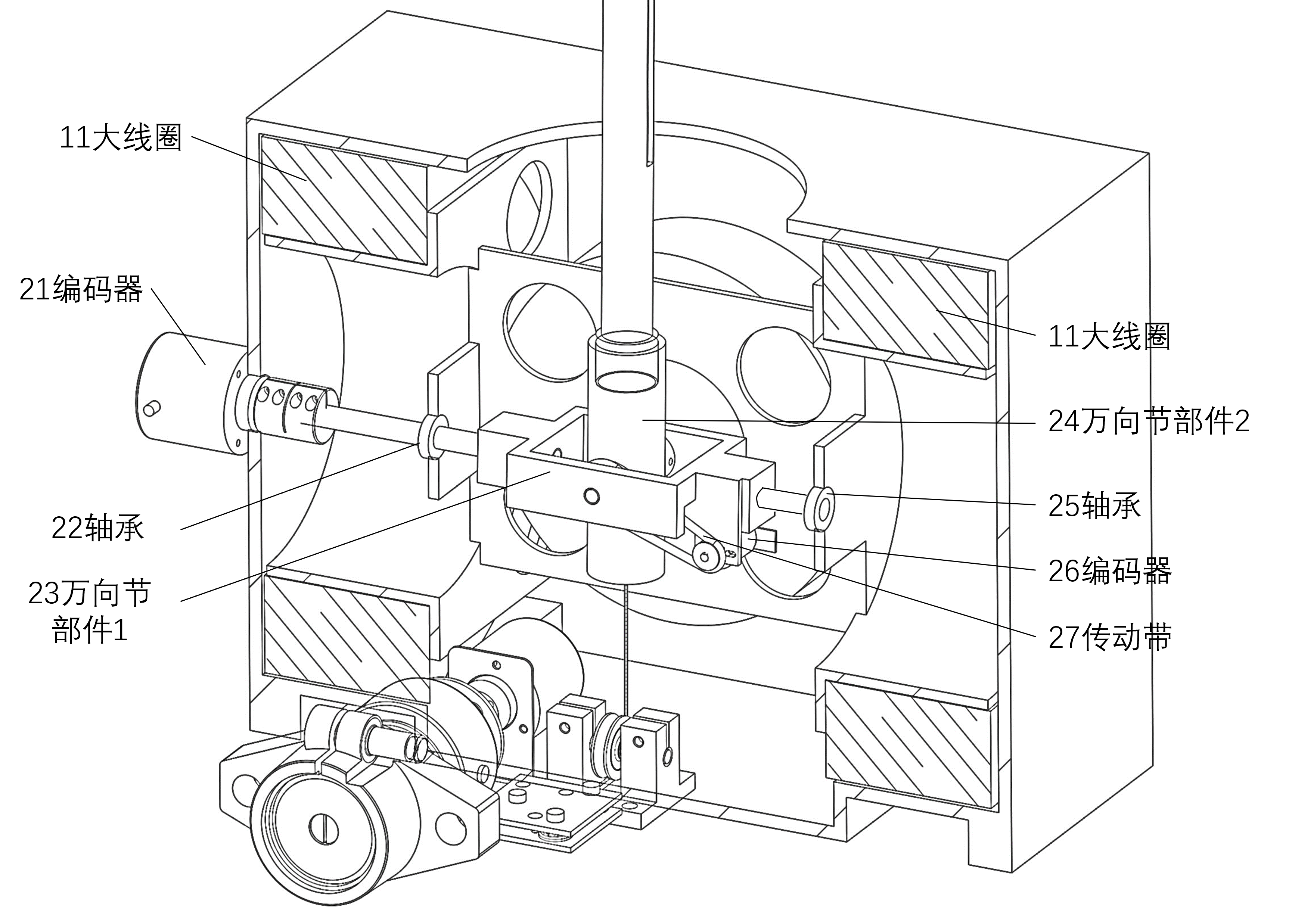
フォース フィードバック デバイスとその応用 (中国発明特許 CN113081275A / PCT 公開 WO2022204869A1) この特許は、穿刺ロボットのメインハンド端における力フィードバックの問題に焦点を当てており、2組の相互に直交するコイルと永久磁石に基づくジョイスティックフィードバックデバイスを提案している。伝達ロープとヒステリシスブレーキを組み合わせて双方向トルクを合成することで力と姿勢のフィードバックを実現し、穿刺動作の自由度の要件を満たしながら構造の複雑さとシステムコストを削減します。 特許情報 中国オープンCN113081275A国際公開WO2022204869A1申請番号202110333369.4申請日2021.03.29中国発表の日2021.07.09発明の名称フォースフィードバックデバイスとその応用申請者深セン国立高性能医療機器研究所株式会社発明者鄭海龍、周祥軍、ウェン・ティシャン、林暁鋒分類番号A61B 34/30; A61B 17/34; G06F 3/01 コア構造と設計ポイント 互いに直角に配置された 2 組のコイルを使用して、ジョイスティック内の中央領域の永久磁石に制御可能な磁界を印加し、それによって 2 方向のトルク フィードバックを合成します。永久磁石はユニバーサル ジョイント アセンブリを介してジョイスティックに接続されており、オペレーターは穿刺姿勢を調整する際に、より直接的な角度と力のフィードバックを得ることができます。ジョイスティック内部にガイドコラム、伝達ロープ、穿刺接続パイプを設置し、穿刺動作とフィードバック荷重を考慮したロングストロークの操作構造を採用しています。底部力負荷コンポーネントは、コイル スプリング、カップリング、ヒステリシス ブレーキ、リール、エンコーダーで構成され、張力の調整と動作状態の記録に使用されます。特許取得済みのシステムの位置決めは、単なるメインハンドルではなく、力フィードバックデバイスを穿刺ロボットのメインハンドの一部として使用して、より完全な術中の相互作用を実現します。 技術的背景 この特許は、穿刺ロボットにおける人間と機械の相互作用の問題に焦点を当てています。従来のフォースフィードバック装置は、触覚情報と力情報の一部を再現できますが、穿刺手術中の姿勢、ストローク、およびメインハンドエンドの自由度の要件に直面すると、複雑な構造、冗長な自由度、または高コストのために実装が困難なことがよくあります。…
-

骨盤骨折整復ロボット
光学追跡に基づく直並列骨盤骨折整復ロボットシステム 技術分野 この装置は、骨盤骨折整復手術に適した光学追跡ベースの手術ロボットシステムに関する。 特許比較 骨盤骨折整復手術のこの分野には、特許番号 CN202110569923、CN202011212195、CN201510144378 など、同様の特許がすでに多数あります。 特許番号 CN202110569923 – 直並列ハイブリッド骨盤骨折整復ロボットは、線形モジュールと球面平行機構の組み合わせを使用して、骨針の操作に必要な自由度と剛性を実現します。しかしながら、特許文献に記載されている解決策では、システムは骨盤の医用画像と連携して、ロボットが骨盤の位置を認識して位置フィードバックを取得できるようにすることができない。つまり、システムは外科手術全体を通じて開ループ方式で動作します。リセット操作が完了すると、リセット後の医療画像に表示されるエラーに基づいてそれ以上の操作を実行することはできません。さらに、この設計では 3 つのリニア モジュールを使用して直列部分を形成しています。このロボットは作業スペースや搬送能力が大きいものの、構造上の動作特性上、使い捨てや無菌フィルムでの使用が難しく、安全性への配慮が不足しているため、使用中の無菌性を確保することが困難です。 特許番号 CN202011212195 – 空間ハイブリッド骨盤骨折整復ロボットは、移動可能な骨盤骨折整復ロボットです。その設計原理は上記の特許と同様であり、どちらも直並列ハイブリッド設計のロボット構造です。同様に、医療画像とロボット座標系との関係については、特許文書では取り上げられていません。この問題は上記特許と同様である。制御はオープンループであるため、リセットエラーを修正し、ロボットの実際のリセット精度を確保することが困難です。 特許番号 CN201510144378 – 6 自由度直並列骨盤骨折整復ロボットは、CN202110569923 と同様の設計を記載しています。この設計は後者とは異なり、手術中の無菌性を確保して手術の安全性を確保するために滅菌膜で包むことができます。上述のロボットにおける精度フィードバックと医用画像処理との間の調整の問題もある。 背景技術 社会の自動車保有率の増加に伴い、自動車事故の発生確率や交通事故による負傷者数も年々増加しています。骨盤骨折は、自動車事故や地震などの重大な外部衝撃による災害でよく見られる重篤な外傷です。従来の人工骨盤縮小手術では、術前や術中のX線画像をもとに、外科医が骨針などを用いて骨盤患部の位置を調整し、固定して整復するのが一般的でした。ただし、実際のアプリケーションでは、通常、縮小状況を継続的に確認するために複数の X 線画像を撮影する必要があります。さらに、画像と骨盤の実際の位置との間のマッピングは直感的ではなく、医師が経験に基づいて判断する必要があります。これにより間接的に手術時間が延長され、必然的に医師と患者により多くの放射線が照射されます。 この記事のロボット設計で説明されている手順は、骨ピンを移植した後に患部を調整および再配置するプロセスです。骨針の移植が完了すると、ロボットのエンドエフェクターが骨針を操作して、骨盤の患部の整復作業を完了します。上記のいくつかの特許はこの課題を達成できますが、それらの解決策ではシステムと医用画像の間の位置合わせ関係を示すことができないため、ロボットの整復操作が実際の骨折転位距離と整復後の精度に適合しているかどうかを保証するのは困難です。 番組内容…