
光学追跡に基づく直並列骨盤骨折整復ロボットシステム

技術分野
この装置は、骨盤骨折整復手術に適した光学追跡ベースの手術ロボットシステムに関する。
特許比較
骨盤骨折整復手術のこの分野には、特許番号 CN202110569923、CN202011212195、CN201510144378 など、同様の特許がすでに多数あります。
特許番号 CN202110569923 – 直並列ハイブリッド骨盤骨折整復ロボットは、線形モジュールと球面平行機構の組み合わせを使用して、骨針の操作に必要な自由度と剛性を実現します。しかしながら、特許文献に記載されている解決策では、システムは骨盤の医用画像と連携して、ロボットが骨盤の位置を認識して位置フィードバックを取得できるようにすることができない。つまり、システムは外科手術全体を通じて開ループ方式で動作します。リセット操作が完了すると、リセット後の医療画像に表示されるエラーに基づいてそれ以上の操作を実行することはできません。さらに、この設計では 3 つのリニア モジュールを使用して直列部分を形成しています。このロボットは作業スペースや搬送能力が大きいものの、構造上の動作特性上、使い捨てや無菌フィルムでの使用が難しく、安全性への配慮が不足しているため、使用中の無菌性を確保することが困難です。
特許番号 CN202011212195 – 空間ハイブリッド骨盤骨折整復ロボットは、移動可能な骨盤骨折整復ロボットです。その設計原理は上記の特許と同様であり、どちらも直並列ハイブリッド設計のロボット構造です。同様に、医療画像とロボット座標系との関係については、特許文書では取り上げられていません。この問題は上記特許と同様である。制御はオープンループであるため、リセットエラーを修正し、ロボットの実際のリセット精度を確保することが困難です。
特許番号 CN201510144378 – 6 自由度直並列骨盤骨折整復ロボットは、CN202110569923 と同様の設計を記載しています。この設計は後者とは異なり、手術中の無菌性を確保して手術の安全性を確保するために滅菌膜で包むことができます。上述のロボットにおける精度フィードバックと医用画像処理との間の調整の問題もある。
背景技術
社会の自動車保有率の増加に伴い、自動車事故の発生確率や交通事故による負傷者数も年々増加しています。骨盤骨折は、自動車事故や地震などの重大な外部衝撃による災害でよく見られる重篤な外傷です。従来の人工骨盤縮小手術では、術前や術中のX線画像をもとに、外科医が骨針などを用いて骨盤患部の位置を調整し、固定して整復するのが一般的でした。ただし、実際のアプリケーションでは、通常、縮小状況を継続的に確認するために複数の X 線画像を撮影する必要があります。さらに、画像と骨盤の実際の位置との間のマッピングは直感的ではなく、医師が経験に基づいて判断する必要があります。これにより間接的に手術時間が延長され、必然的に医師と患者により多くの放射線が照射されます。
この記事のロボット設計で説明されている手順は、骨ピンを移植した後に患部を調整および再配置するプロセスです。骨針の移植が完了すると、ロボットのエンドエフェクターが骨針を操作して、骨盤の患部の整復作業を完了します。上記のいくつかの特許はこの課題を達成できますが、それらの解決策ではシステムと医用画像の間の位置合わせ関係を示すことができないため、ロボットの整復操作が実際の骨折転位距離と整復後の精度に適合しているかどうかを保証するのは困難です。
番組内容
既存の技術の上記の欠点を考慮して、このソリューションは、臨床手術に対応できることをベースに、骨盤骨折整復手術用の直並列ロボット システムを設計します。このシステムは、このタイプのロボットに光学位置決めシステムを統合し、医療画像位置合わせの下でこのシステムに基づいてロボット支援手術プロセスを記述します。各座標系の位置合わせが完了すると、ロボットシステムと術前・術中の医用画像が光学式位置決め座標系に統合され、ロボットが患部骨盤の位置を把握し正確に再設定できるようになります。
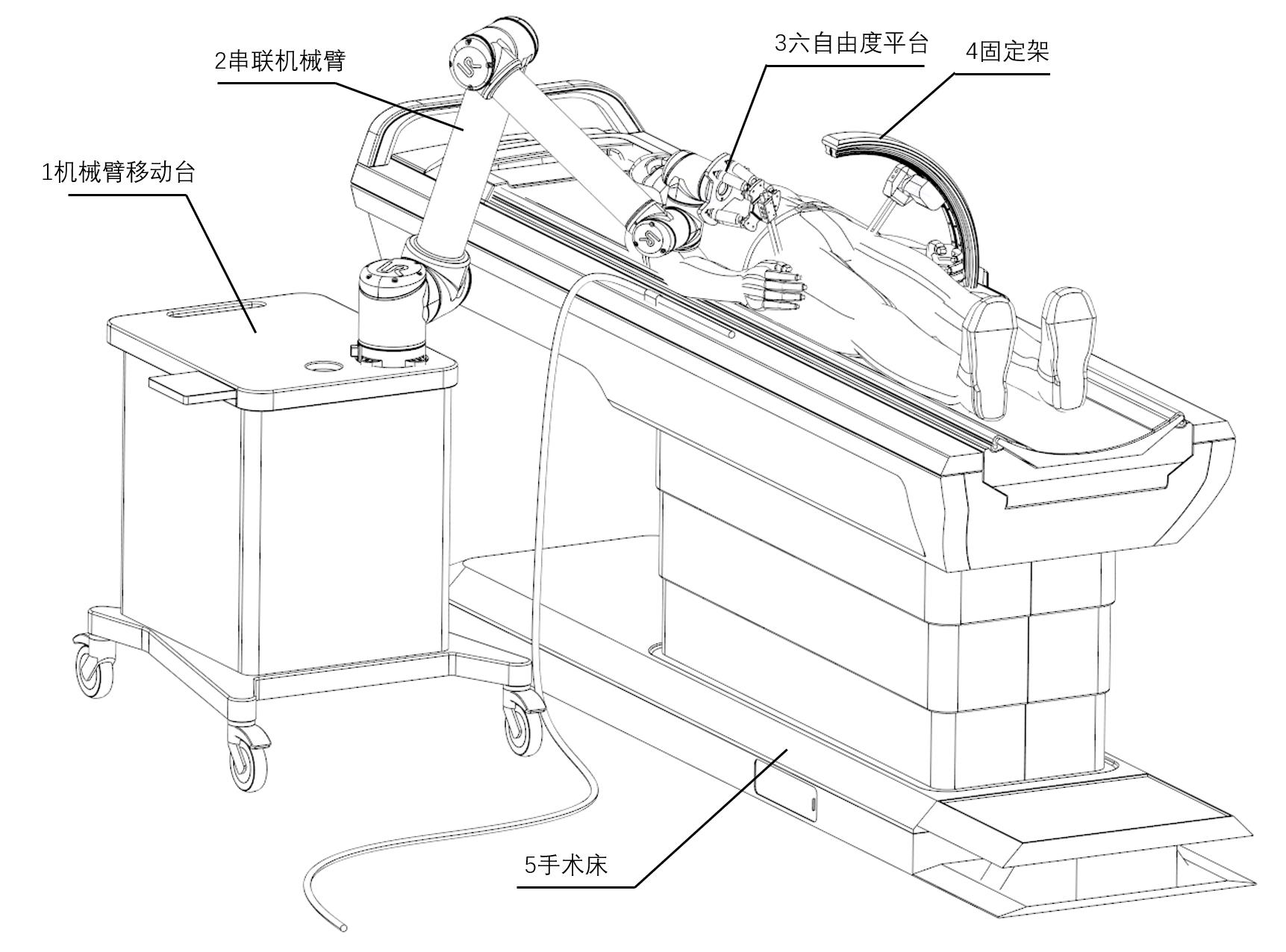
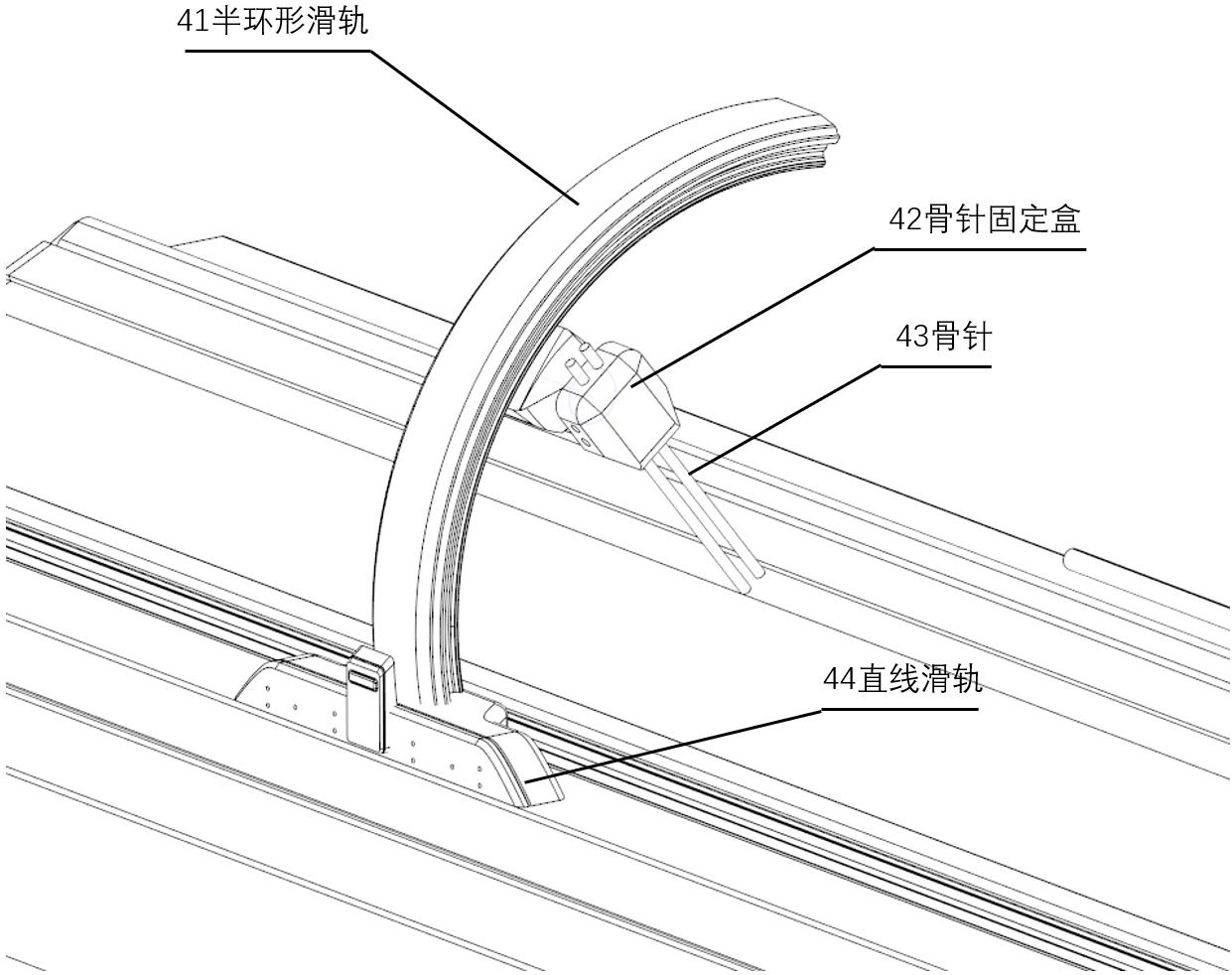
手術ロボットの設計には、手術台、移動ロボット アーム、直列ロボット アーム、6 自由度プラットフォーム、および固定フレームが含まれます。直並列動作アームは、リセット動作の動作要件を満たすために 12 の自由度を提供します。ロボット アームのエンド エフェクター部分は、反射ボール マーカーを備えた骨針固定ボックスであり、光学位置決めプローブで捕捉してボックスの位置をフィードバックできます。手術台上でフレームがスライドし、健側の骨盤の位置を安定させます。
図面の説明
【図1】システムの各装置の動作の概略図である。
固定フレームの構成を示す模式図である。
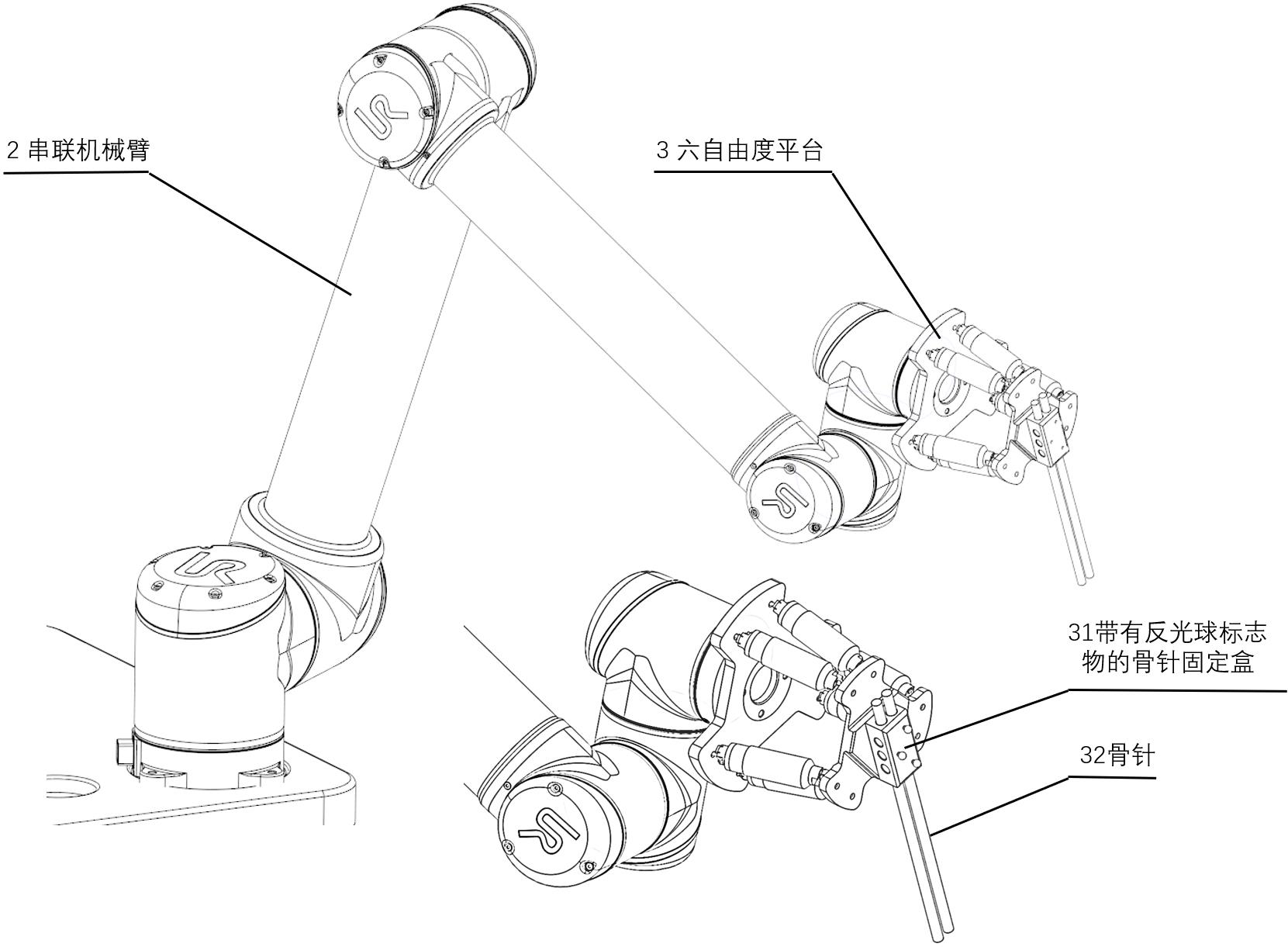
直並列ロボットアームの概略構成図である。
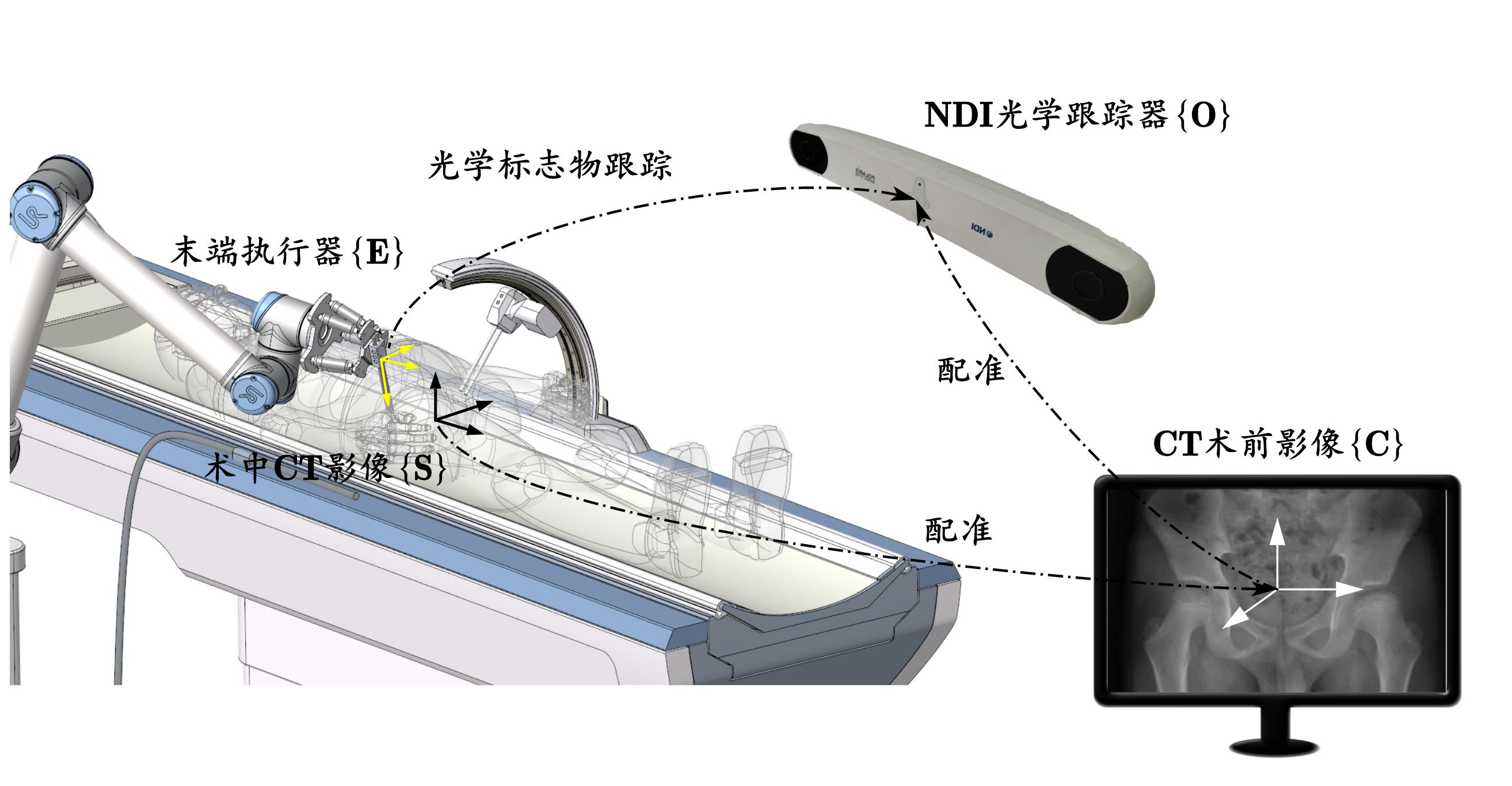
システムの座標系間の関係を示す概略図である。
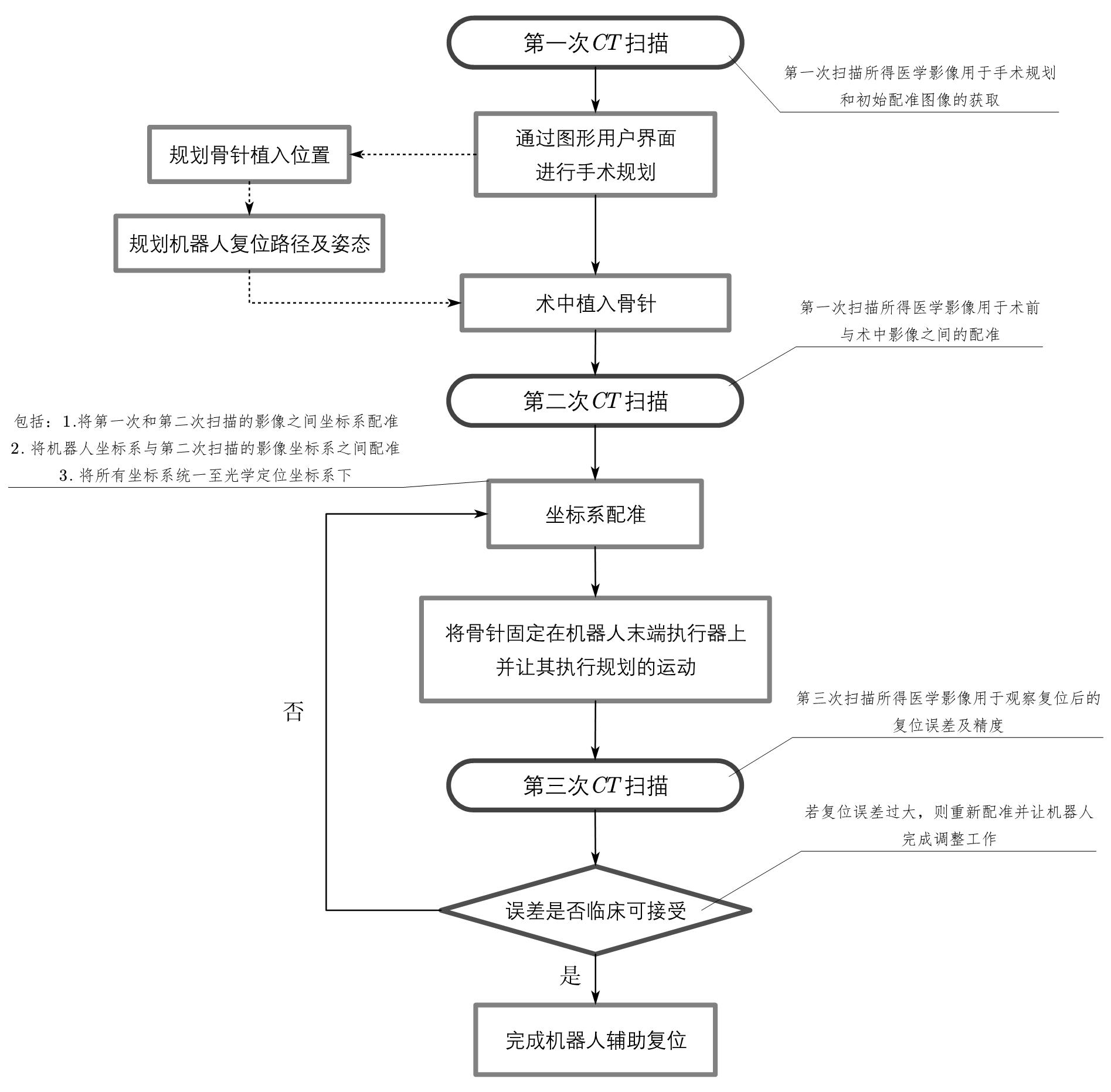
図5は、システムのワークフロー図である。
発明の内容
図1にシステムの各機器の構成と動作図を示します。整復作業を行う前に、医師は骨ネジを移植した後、反射ボールを使用して 31 骨ネジ固定ボックスに骨釘を固定する必要があります。同時に、非罹患側の骨ネジを 42 骨ネジ固定ボックスに固定する必要があります。 2 回目の CT スキャンが完了した後、2 つの固定ボックスがそれぞれ 36 自由度のプラットフォームと 4 固定フレームに設置されました。このとき、医師が光学プローブを使用して患者の骨盤の重要点の取得を完了した後、コンピュータはアルゴリズムを使用して、患者の実際の骨盤解剖学的構造の医療画像への直接座標系の位置合わせを完了します。
整復プロセス中、4 つの固定フレームは、影響を受けていない骨盤に移植された骨針に接続されて固定されます。 36 自由度プラットフォームは 2 シリーズ ロボット アームの端に固定され、反射ボール マーカーを備えた 31 骨針固定ボックスは 36 自由度プラットフォームの他端に 32 骨針と一緒に固定されます。 36 自由度のプラットフォームは、繊細な動きで骨針を操作し、手術前に計画された経路を完成させます。その後、医師は 31 個と 42 個の固定ボックスを取り外し、患者に 3 回目の CT スキャンを実行して整復後の誤差を特定しました。エラーが臨床的に許容できない場合は、再度リセットします。臨床的に許容できる場合は、リセット操作を完了します。
図 3 に示す直並列マニピュレータは、ユニバーサル構造を備えたマニピュレータの組み合わせの一種です。この特許では、市販の UR10 協調マニピュレーター (Universal Robot、米国) と H-820 6 自由度プラットフォーム (PI、米国) を例として使用し、システムの構成と動作原理を紹介します。
図 4 は、光学追跡下での各サブ座標系間の位置合わせ関係を示しています。位置合わせ方法については、論文「肝腫瘍用超音波誘導穿刺ロボットのシステム設計と制御」(Lin Xiaofeng. System Design and Control of Ultrasound-Guided Puncture Robot for Liver Tumors [D]. 中国科学院大学(深セン先端技術研究所、中国科学院)、2021.)の「2.3.2 システム位置合わせ方法の紹介」に詳しく記載されています。
この特許に記載されているシステムには、合計 4 つの主要な座標系、つまり光学位置決め座標系 {O}、術前 CT 画像座標系 {C}、ロボットのエンドエフェクター座標系 {E}、および患者の術中 CT 画像座標系 {S} が含まれます。光学式位置決めシステムは、位置測定システムの一種です。まず、追跡する必要があるターゲットに無線光学式マーカーを取り付けます。マーカの形状と表面は特殊加工されており、光位置決めレーザー発生器が近赤外光を発光することで独自の座標系でこの特殊マーカの位置を捉えることができます。複数のマーカーを同時に取り付けてマーカー ブラケットを形成する場合、位置決めシステムはブラケットの位置と姿勢の情報を同時にフィードバックできます。
このシステムで使用されるマーカー ブラケットは、3 つの受動的反射ボールで構成されるローカル座標系であり、31 骨ネジ固定ボックスに取り付けられます。これは、NDI 光学トラッカーがエンドエフェクター {E} の位置と姿勢を直接取得できることを意味します。さらに、論文で説明されている反復最近点ベースの位置合わせ方法を通じて、骨盤上のいくつかの選択されたランドマーク点を使用して、骨盤の術中 CT 画像 {S} と術前 CT 画像 {C} の間の位置合わせを実行できます。位置合わせ後、光学位置決め座標系{O}で表現された術中CT画像{S}と術前CT画像{C}との間の座標変換関係が得られる。このとき、光学位置決め座標系{O}は、術前に計画された経路および術前画像座標系{C}に基づいて定義される他の座標を表すために使用することができる。
また、直並列マニピュレータの幾何学的関係は固定されているため、ロボット座標系自体は、設置された反射球のローカル座標系からエンドエフェクタ座標系{E}を介して光学位置決め座標系{O}にマッピングすることができる。このようにして、すべての座標系を統一座標系 {O} で表現することができ、ロボットが手術計画で計画された動作を実行できるようになります。また、ロボットシステムがリセットエラーを把握し、動作中に適時に調整できるようになります。
写真付きの説明書

{kind=link}

{kind=link}

{kind=link}

{kind=link}

{kind=link}
Leave a Reply